The SBI Single Burning Item test is widely used to evaluate the fire reaction performance of building products, insulation materials, decorative boards, composite panels, and other construction-related materials. It is not a simple ignition test. Instead, it is a complete fire performance test system that combines a combustion chamber, burner, exhaust duct, smoke measurement, gas sampling system, gas analyzer, temperature and pressure measurement, flow calculation, and data acquisition software.
In an SBI test, the final report and software curves depend heavily on the stability of the gas sampling and gas analysis system. In many field service cases, the gas analyzer can power on normally, the O₂, CO₂, and CO sensors appear normal in the software, and the analyzer screen may still show reasonable readings. However, the customer may still report two typical problems:
The gas flow is too low.
The test curves or software graphs are abnormal.
This type of fault is often misjudged as a failed gas sensor, a software problem, or a calibration error. In many real cases, the root cause is not the sensor itself, but the sampling gas path: blocked filters, contaminated tubes, poor condensation drainage, weak sampling pump, dirty valve seats, blocked flowmeters, branch imbalance, or outlet back pressure.
This article analyzes this type of failure from an engineering maintenance perspective and explains how to diagnose low gas flow and abnormal SBI test curves systematically.
1. The Role of the Gas Analysis System in an SBI Test
During an SBI test, combustion products are collected by the exhaust system. A portion of the exhaust gas is drawn through the sampling line and sent to the gas analyzer after filtration, condensation, drying, and flow regulation.
The gas analyzer normally measures:
O₂ concentration;
CO₂ concentration;
CO concentration.
These values are not only displayed for reference. They are key input signals for the SBI software. The software uses oxygen consumption, carbon dioxide generation, carbon monoxide generation, exhaust flow, pressure, temperature, and smoke data to calculate the dynamic combustion behavior of the tested material.
Typical calculated parameters may include:
Heat release rate;
Total heat release;
Smoke production rate;
Total smoke production;
FIGRA;
SMOGRA;
Gas concentration trends.
The O₂ channel is especially important because many heat release calculations are closely related to oxygen consumption. If the O₂ sampling flow is low, delayed, diluted, or unstable, the calculated heat release curve will be distorted. The CO₂ and CO channels are also important because they reflect combustion products and combustion completeness.
Therefore, the gas analyzer system must satisfy several conditions at the same time:
The sampling flow must reach the required value.
The gas path must be free from blockage.
The sampling line must not leak.
The filters must not be overloaded.
The condenser and drainage system must work properly.
The sampling pump must provide sufficient suction.
The O₂, CO₂, and CO channels must have normal response times.
The gas transport delay must be stable.
The calibration gas and sample gas switching path must be correct.
The outlet must be free from blockage and excessive back pressure.
If any of these conditions fail, the sensor may still show a normal status, but the final SBI test curve may still be wrong.
2. Typical Fault Symptoms
When the SBI gas sampling system has a flow problem, the following symptoms are commonly seen:
The flowmeter float cannot reach the red target line.
The O₂ channel flow is too low.
The CO/CO₂ channel flow is too low.
When the front sampling line is disconnected, one channel rises but the other channel does not change much.
A small filter becomes dirty again only a few days after replacement.
Black dots, yellow stains, tar marks, or rust-like particles appear on the filter.
Transparent tubes become yellow, brown, or hard.
The sampling pump makes noise, but the actual flow is still insufficient.
The gas analyzer display shows O₂, CO₂, and CO values, but the dynamic response is slow.
The software curve is delayed, flattened, or unstable.
Peak values are too low.
The test image or graph does not match the expected combustion process.
Zero and span calibration may appear successful, but real test results remain abnormal.
The gas values recover very slowly after the test.
Test repeatability is poor.
These symptoms usually indicate a gas path problem rather than a simple sensor failure.
3. Why Normal Sensor Status Does Not Mean Normal Test Results
A common field mistake is to judge the whole system only by the sensor status in the software. If the software shows that the O₂, CO₂, and CO sensors are normal, the user may assume that the gas analysis system is healthy. This is not correct.
Sensor status usually means that the sensor circuit has no obvious electrical alarm, the signal is not out of range, communication is normal, and the current static reading can be obtained. However, an SBI test requires dynamic gas data. During combustion, gas concentrations change rapidly. The analyzer must receive the gas sample at the correct flow rate and with a predictable response time.
If the sampling flow is low, several problems occur.
First, the gas takes longer to reach the analyzer. The combustion event occurs in the test chamber, but the gas analyzer receives the concentration change too late. The curve shifts in time.
Second, the gas replacement inside the tubes, filters, condenser, and analyzer cell becomes slow. Old gas remains in the system, while new gas enters slowly. This produces a tailing effect and slows the response.
Third, the peak value is reduced. A combustion peak may last for only a short time. If the sampling system responds too slowly, the peak is mixed, delayed, and damped before reaching the sensor. The software then sees a lower peak than the real one.
Fourth, different gas channels may have different delays. For example, if the O₂ channel is slow and the CO₂ channel is faster, the software receives mismatched signals. This phase difference can distort calculated heat release and gas curves.
Fifth, calibration becomes misleading. Under low-flow conditions, static zero and span readings may still be adjusted, but the dynamic response during a real fire test remains wrong.
Therefore, troubleshooting an SBI gas analysis system must separate two concepts:
Sensor electrical status;
Gas sampling and dynamic response condition.
A normal sensor does not prove that the gas path is normal. A stable static reading does not prove that the dynamic test curve is reliable.
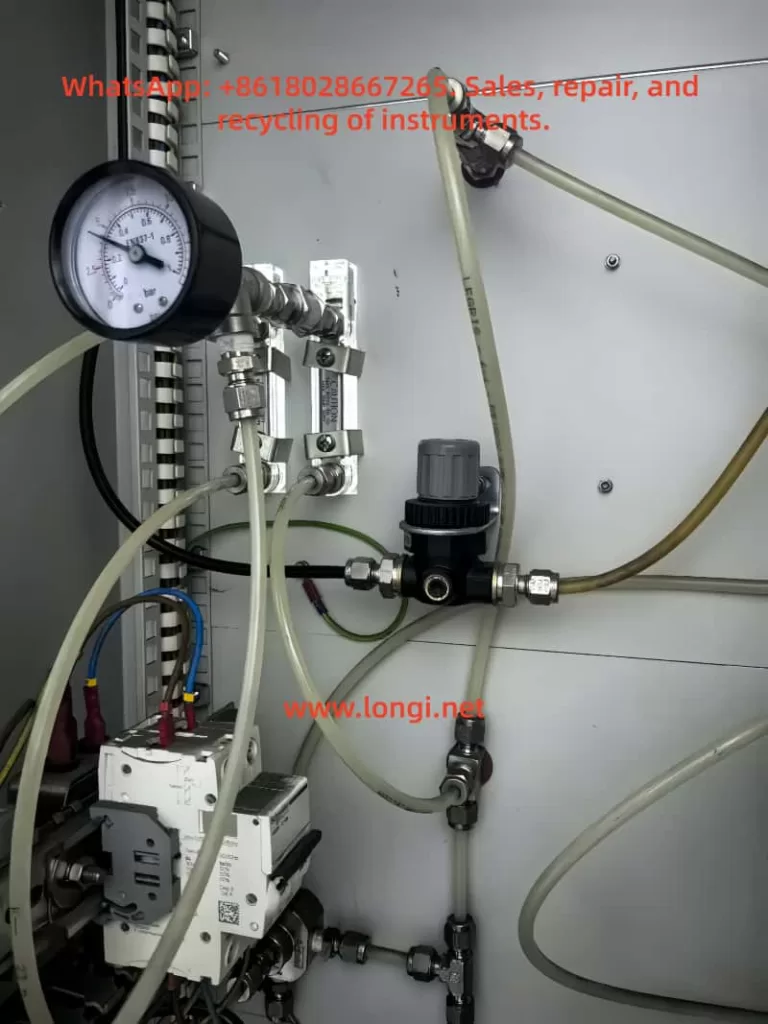
4. How to Interpret the Flowmeter Reading
Many SBI gas analysis cabinets have separate flowmeters for the O₂ channel and the CO/CO₂ channel. A red line is often marked on the flowmeter, indicating the required target flow. In some systems, this target may be around 3 L/min, but the exact value must follow the equipment specification and calibration setting.
When reading the flowmeter, several points should be noted:
The red line is not the actual flow; it is only a target reference.
The actual flow must be read from the float position.
Both channels should be close to the target and stable.
If one channel is obviously low, that branch may be blocked, restricted, leaking, affected by weak suction, or suffering from outlet back pressure.
If both channels are low, the common sampling pump, common gas path, front filter, condenser, or exhaust path may be faulty.
If the flow rises after disconnecting the front sampling line, the front gas path has high resistance.
If the flow does not rise after disconnecting the front sampling line, the problem is more likely inside that branch, inside the analyzer gas path, at the flowmeter, at the gas cell, at the pump side, or at the outlet.
A typical example is this: after disconnecting the front sampling line and allowing the analyzer to draw ambient air, the CO/CO₂ flow rises, but the O₂ flow does not change much. This means the CO/CO₂ channel still has suction capacity and is mainly affected by front-end resistance. However, the O₂ channel likely has an internal restriction, such as a blocked O₂ filter, needle valve, flowmeter, analyzer cell inlet, restrictor, outlet tube, or internal branch tube.
5. What It Means When a Small Filter Becomes Dirty Again Quickly
If a small gas filter was replaced only a few days ago and already shows black dots, yellow stains, brown marks, or rust-like particles, this is not normal. It means there is still a contamination source upstream of the filter.
The contamination may come from several sources.
The first source is soot from combustion exhaust. SBI testing often involves building materials, insulation boards, decorative panels, plastic composites, or organic materials. These materials can generate soot during combustion. If the front coarse filter is not effective, soot particles will reach the downstream fine filter.
The second source is tar and organic condensate. When hot combustion gases cool down, organic vapors may condense into yellow-brown or black sticky substances. These deposits attach to tube walls, filters, pump heads, and gas cells.
The third source is water carrying contaminants. Combustion gas contains water vapor. If the condenser or drainage system does not work well, moisture can carry soot, soluble compounds, and acidic contaminants downstream.
The fourth source is metal oxide or rust powder. If metal sampling tubes, fittings, condenser parts, or other metal components are exposed to moisture for a long time, oxidation particles may be carried by the gas flow.
The fifth source is pump wear debris. If a diaphragm pump has operated for a long time with wet and dirty gas, its diaphragm, valve plates, or seals may degrade and produce black particles.
For this reason, replacing only the small filter does not solve the root cause. The upstream contamination source must be found. Otherwise, the new filter will become dirty again quickly, and the flow will drop again.
6. The Meaning of Yellowed or Hardened Transparent Tubes
SBI gas sampling systems often use transparent or semi-transparent tubes. A clean gas path should have relatively clear tubing, without visible deposits. If the tubes are yellow, brown, blackened, or hardened, it usually means that smoke, moisture, tar, or other contaminants have passed through them for a long time.
Contaminated tubes create several problems:
Deposits reduce the effective inner diameter.
Tar increases gas adsorption and causes response tailing.
Soot and particles can detach during operation and contaminate new filters.
Hardened tubing may lose sealing performance at fittings.
Tube bends and low points may accumulate water.
Partial collapse or deformation can reduce flow.
In many service cases, replacing only the filter is not enough. If the old tubes remain contaminated, the system will continue shedding particles and tar residue. For an SBI smoke sampling system, visibly yellowed or hardened tubes should usually be replaced, especially around the pump inlet, pump outlet, condenser outlet, filter inlet, O₂ branch, and CO/CO₂ branch.
7. A Sampling Pump That Makes Noise May Still Be Faulty
The sampling pump is one of the most important parts of the SBI gas analysis system. A common field misunderstanding is that if the pump makes noise, the pump is good. This is wrong.
A diaphragm pump or micro gas pump may still run electrically but fail to provide sufficient suction or flow.
Common pump problems include:
Aged diaphragm;
Cracked diaphragm;
Valve plate stuck by tar;
Water inside the pump head;
Soot and tar inside the pump chamber;
Aged sealing ring;
Partially blocked inlet or outlet fitting;
High outlet back pressure;
Reduced motor speed;
Worn pump chamber and poor volumetric efficiency.
Pump weakness may appear as:
Both channels have low flow.
Blocking the sampling inlet does not change the pump sound much.
Disconnecting the front line does not restore flow.
The flow is unstable.
The software curve is slow and flat.
Filters and tubes have been replaced, but flow is still insufficient.
The correct way to test the pump is to isolate it. Disconnect the pump inlet from the front sampling system and let the pump draw ambient air directly. If the flow returns to the target value, the pump is probably able to work, and the blockage is upstream. If the flow remains low even when the pump draws directly from ambient air, the problem is likely in the pump head, diaphragm, valve plates, downstream branch, outlet, or internal gas path.
8. Condenser and Drainage Problems Are Very Common
Combustion exhaust contains water vapor. Before the gas enters the analyzer, it usually must be cooled, condensed, and dried. If the condenser is not working properly, the drain pump fails, the drain bottle is full, the water separator is blocked, or condensate is carried downstream, the gas sampling system will become unstable.
Typical signs of condensation or drainage problems include:
The small filter is wet.
Water droplets appear in transparent tubes.
The flowmeter float fluctuates.
The flow suddenly drops.
Water accumulates at low points in the tubing.
The filter changes color quickly.
CO₂ and CO response becomes slow.
O₂ reading recovers slowly.
Water enters the pump head.
The software curve becomes unstable.
A water blockage can be difficult to find. It may not completely block the gas path. Instead, it creates unstable resistance. Sometimes the flow looks acceptable, but when a water droplet moves to a fitting, valve, or low point, the flow suddenly decreases.
Therefore, every low point in the tubing must be checked. The sampling line should not form a water trap. The condenser temperature, drain pump operation, drain bottle condition, water separator, dryer, and downstream filter dryness should all be confirmed.
If a downstream filter is wet, replacing the filter alone is not enough. The condenser and drainage problem must be corrected first.
9. Key Inspection Points for Low O₂ Channel Flow
The O₂ channel is critical in SBI testing. If the O₂ flow is low, the final calculated curve may be seriously wrong even if CO₂ and CO values still change.
When the O₂ channel flow is low, inspect the following parts:
O₂ channel small filter;
O₂ branch needle valve;
Internal blockage inside the needle valve;
O₂ flowmeter float;
Fittings before and after the O₂ flowmeter;
O₂ analyzer cell inlet;
Small restrictor or capillary at the cell inlet;
Contamination inside the O₂ cell;
O₂ outlet tube;
Outlet back pressure;
Internal soft tube deformation or collapse;
Leakage in the O₂ branch;
Weak suction in the O₂ branch.
If the O₂ flow does not rise after the external sampling line is disconnected, the problem is not mainly in the front sampling probe. It is more likely inside the O₂ branch itself. The best approach is to disconnect the O₂ flowmeter inlet and observe whether the float rises. Then disconnect the flowmeter outlet to determine whether the restriction is before the flowmeter, inside the flowmeter, or after the flowmeter.
10. Key Inspection Points for Low CO/CO₂ Channel Flow
The CO/CO₂ channel often passes through an infrared measurement section or related analyzer cell. It is also sensitive to flow, moisture, and contamination.
When the CO/CO₂ flow is low, inspect the following areas:
Sampling probe blockage;
Smoke coarse filter blockage;
Condenser water accumulation;
Drain bottle blockage;
Water separator blockage;
Dryer failure;
CO/CO₂ small filter blockage;
CO/CO₂ needle valve blockage;
Infrared gas cell inlet contamination;
CO/CO₂ outlet back pressure;
Water accumulated at tube low points;
Yellowed tubing with internal deposits.
If the CO/CO₂ flow rises after the front sampling line is disconnected, the channel is not completely blocked. The main resistance is likely upstream. However, this does not mean the internal channel is perfectly clean, because long-term contamination may have already entered the downstream section.
11. Do Not Ignore Outlet Blockage and Back Pressure
Many technicians focus only on the inlet side of the gas path. However, outlet blockage can also reduce inlet flow.
Outlet problems include:
Bent exhaust tube;
Compressed outlet tube;
Outlet connected to the wrong port;
Stuck check valve;
Condensate inside the exhaust tube;
Blocked outlet filter;
Excessive back pressure;
Cross-interference between different channel outlets.
If the analyzer outlet is restricted, the sampling pump cannot discharge gas smoothly. As a result, the inlet flow decreases. In a multi-channel gas analyzer, a blocked outlet in one branch may cause low flow, slow response, and ineffective flow adjustment in that branch.
Therefore, both inlet and outlet paths must be inspected during troubleshooting.
12. Section-by-Section Testing Is the Most Effective Method
When an SBI gas analysis system has low flow, guessing is not efficient. The most effective diagnostic method is section-by-section isolation.
A recommended procedure is as follows.
First, record the current flow of both channels.
Record the actual float positions of the O₂ and CO/CO₂ flowmeters. Confirm how far they are from the target red line.
Second, disconnect the analyzer inlet and let it draw ambient air.
If the flow rises significantly, the front sampling system has high resistance. If the flow remains low, the problem is likely inside the analyzer branch, pump path, outlet, or pump itself.
Third, disconnect the pump inlet and let the pump draw ambient air directly.
If the flow returns to normal, the blockage is before the pump. If the flow remains low, suspect the pump, pump outlet, downstream branch, or exhaust path.
Fourth, check the pump outlet.
If the pump outlet has poor discharge or high pressure, inspect the pump head, valve plates, diaphragm, and outlet back pressure.
Fifth, reconnect the condenser, filters, and probe one section at a time.
After reconnecting each section, observe the flow. If the flow drops sharply after one section is connected, the blockage or resistance is in that section or upstream of it.
Sixth, test the O₂ and CO/CO₂ branches separately.
Do not only test the common line. Each branch may have its own needle valve, filter, flowmeter, analyzer cell, and outlet.
Seventh, perform an inlet blocking test.
When the system is running, block the sampling inlet. Under normal conditions, the flow should quickly drop close to zero, and the pump sound should change. If the flow does not drop clearly, there may be a leak. If the pump sound does not change, the pump may be weak or the blocked point may not be in the effective suction path.
This method quickly separates the problem into front sampling system, pump, analyzer internal branch, or outlet.
13. How Gas Leaks Affect SBI Curves
Apart from blockage, leakage is another common problem. The upstream side of the sampling pump is usually under negative pressure. If a fitting, tube, filter housing, condenser seal, drain bottle, three-way valve, or solenoid valve leaks, ambient air will be sucked into the sample line.
Leakage can cause:
Sample gas dilution;
Lower CO₂ peak;
Lower CO peak;
Weak O₂ decrease;
Flattened curves;
Lower calculated heat release;
Poor repeatability;
Normal calibration but abnormal real test curves.
Leakage does not always cause low flow. In some cases, the flowmeter may look normal because the pump is drawing air, but the air is not the correct smoke sample. This is more dangerous because the operator may assume that the flow is acceptable, while the concentration data is already diluted.
Leak detection methods include:
Blocking the sampling inlet and checking whether the flow drops to zero;
Checking positive-pressure fittings with soap solution;
Using smoke or alcohol vapor near negative-pressure fittings and observing reading changes;
Inspecting aged or cracked tubes;
Checking filter housing O-rings;
Checking quick fittings;
Checking condenser and drain bottle seals.
14. Why Calibration Should Not Be Done Before Flow Is Restored
When abnormal curves appear, some operators immediately perform zero and span calibration. This is the wrong sequence if the gas flow is abnormal.
Calibration requires clean, stable, sufficient gas flow. If the gas path is blocked, leaking, wet, slow, or unstable, the calibration may be misleading.
Under poor flow conditions, calibration can cause several problems:
It may compensate for a gas path fault as if it were a sensor offset.
The calibration process becomes slow and unstable.
Standard gas may be diluted by leakage.
The zero point may drift.
The span may appear correct in static mode but fail during dynamic testing.
The software curve remains abnormal after calibration.
The correct sequence is:
Restore the gas path.
Confirm the correct flow.
Confirm no leakage.
Confirm normal response time.
Then perform zero and span calibration.
15. Recommended Repair Plan
For SBI gas analysis systems with low flow, dirty filters, contaminated tubes, and abnormal curves, the following repair plan is recommended.
First, replace visibly contaminated tubes.
Any transparent tube that is yellow, hardened, brown, blackened, or internally contaminated should be replaced, especially around the pump inlet, pump outlet, filter inlet, condenser outlet, O₂ branch, and CO/CO₂ branch.
Second, replace or clean the front coarse filter.
If the front coarse filter is ineffective, the downstream fine filter will become dirty very quickly. The smoke sample must be properly filtered before reaching the pump and analyzer.
Third, inspect the condenser and drainage system.
Confirm that the condenser cools properly, the drain pump works, the drain bottle is not blocked, the water separator is clean, and no water reaches the downstream filter.
Fourth, inspect the sampling pump.
Check the diaphragm, valve plates, pump head, seals, inlet fittings, and outlet fittings. If water, tar, or black powder is found in the pump head, clean or rebuild the pump. If pump capacity is weak, replace the pump.
Fifth, clean the O₂ branch.
Inspect the O₂ needle valve, filter, flowmeter, analyzer cell inlet, restrictor, outlet, and internal tubes. If O₂ flow adjustment has little effect, a blockage or outlet restriction is likely.
Sixth, clean the CO/CO₂ branch.
Inspect the infrared gas cell inlet, CO/CO₂ filter, needle valve, outlet, and front condensation/filtration system.
Seventh, check all fittings for leakage.
Inspect quick connectors, compression fittings, filter housings, three-way valves, solenoid valves, condenser connections, and drain bottle seals.
Eighth, reorganize tubing layout.
Avoid low points that collect water. Avoid sharp bends. Avoid unnecessarily long tubes. Make sure cabinet doors, cable ducts, or brackets do not press on tubes.
Ninth, perform a response test after flow is restored.
Introduce clean air or standard gas and observe the time required for O₂, CO₂, and CO readings to change and stabilize. The response time should be stable and consistent with equipment requirements.
Tenth, perform zero and span calibration only after the gas path is confirmed.
Calibration after restoring proper flow is meaningful. Calibration before restoring flow is not reliable.
16. Verification After Repair
After repair, do not judge the system only by whether there is some flow. The following points should be confirmed:
The O₂ channel reaches the target flow.
The CO/CO₂ channel reaches the target flow.
Both flow readings are stable.
Blocking the sampling inlet causes the flow to drop quickly.
Disconnecting the inlet and drawing ambient air produces reasonable flow behavior.
The small filter does not become dirty again immediately.
No water droplets are visible in the transparent tubes.
The sampling pump runs smoothly.
O₂, CO₂, and CO readings recover normally.
Standard gas response time is normal.
Software curves show reasonable peak timing and recovery.
Repeated tests are stable.
Only after these checks pass can the SBI gas analysis system be considered reliable again.
17. Conclusion
In an SBI Single Burning Item test system, the gas analysis system is a critical part of the measurement chain. When the equipment shows low gas flow and abnormal software curves, the first suspicion should not be the sensor alone. A gas analyzer may still display O₂, CO₂, and CO values, and the software may still report normal sensor status, but the sampling flow, gas path cleanliness, pump capacity, condensation drainage, and dynamic response may still be wrong.
When the flowmeter cannot reach the target red line, a newly replaced filter becomes dirty again within a short time, transparent tubes turn yellow, the pump makes noise but the flow is low, or one channel rises after disconnecting the front line while another channel does not, the fault should be investigated from the gas sampling path.
Common root causes include blocked filters, water blockage, soot and tar contamination, aged tubing, weak sampling pump diaphragm, stuck pump valve plate, blocked O₂ branch needle valve, excessive CO/CO₂ channel resistance, contaminated gas cell inlet, outlet back pressure, and leakage in the negative-pressure line.
The correct troubleshooting strategy is:
Restore gas flow first.
Then check response time.
Then perform calibration.
Finally verify the SBI software curves.
Section-by-section testing is the most effective diagnostic method. By isolating the sampling probe, condenser, filters, pump inlet, pump outlet, analyzer branches, and exhaust outlet, the technician can quickly determine whether the fault is in the front sampling system, the pump, the internal analyzer branch, or the outlet path.
For an SBI gas sampling system that has been contaminated by combustion smoke for a long time, replacing only the small filter is usually not enough. Contaminated tubes must be replaced, the condenser and drainage system must be cleaned, the sampling pump must be inspected, the O₂ and CO/CO₂ branches must be cleared, low-point water traps must be eliminated, and outlet restrictions must be removed.
Only when both gas channels return to the specified flow, the O₂, CO₂, and CO response times are normal, and the software curves are stable can the SBI test result be considered trustworthy.