In industrial automation maintenance, it is very common for a customer to send only a servo drive nameplate photo or a short alarm video and ask the technician to identify the model, determine the series, and analyze the fault. For experienced servo technicians, the nameplate and alarm code often provide enough key information to establish the initial diagnostic direction. However, for non-specialists, different Panasonic servo drive series can look similar from the outside, and model names can easily be confused. As a result, MINAS LIQI, A4, A5, and A6 series drives are sometimes misidentified.
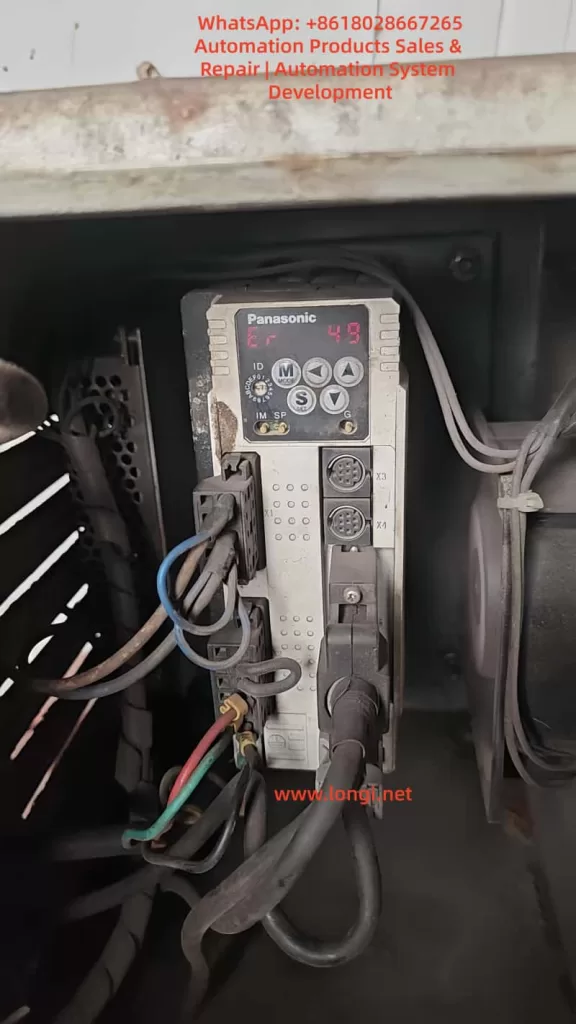
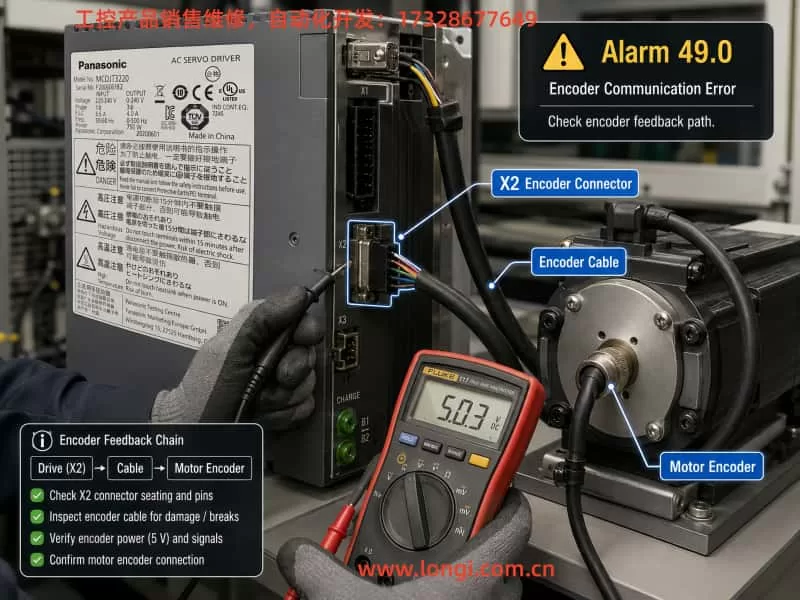
This article is based on a real field case involving a Panasonic AC Servo Driver. The nameplate shows the model as MCDJT3220, and the video appears to show the display flashing 49.0. Based on the nameplate, Panasonic servo model naming, and common field repair experience, this drive should not be identified as a MINAS A5 or MINAS A6 unit. It is a Panasonic MINAS LIQI series servo drive. The displayed alarm 49.0 should not first lead the technician toward the IGBT module, main power circuit, or motor U/V/W output stage. Instead, the main diagnostic direction should be the servo motor encoder feedback chain, especially the encoder itself, encoder cable, X2 encoder connector, and the encoder receiving circuit inside the drive.

1. Nameplate Identification: This Is Not an A5 or A6 Drive, but a LIQI Series Drive
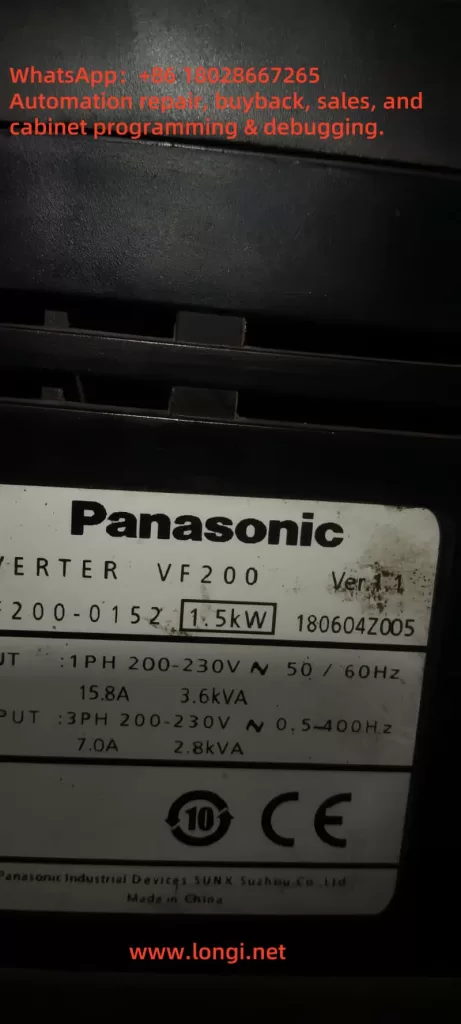
From the customer’s photo, several important details can be read from the drive nameplate:
- Brand: Panasonic
- Product type: AC Servo Driver
- Model: MCDJT3220
- Input power supply: 220–240V AC
- Input phase: single phase
- Output: 0–240V, three phase
- Output current: 4.0A
- Power rating: 750W
The most important information is the model number: MCDJT3220. This model belongs to the Panasonic MINAS LIQI series, not the MINAS A5 or MINAS A6 series.
Many maintenance technicians immediately think of Panasonic A4, A5, or A6 servo drives when they see a Panasonic servo unit, because these series are widely used in factory automation, packaging machines, CNC equipment, labeling machines, printing machines, and various motion control systems. However, Panasonic also has the LIQI series, which is generally positioned as an economical servo system for relatively simple positioning, speed control, light-load transmission, packaging machinery, small automation equipment, and similar applications.
From the model naming structure, MCDJT3220 is clearly different from common A5 or A6 model formats. Panasonic A5 and A6 drives often use model structures such as MBDHT, MCDHT, MADHT, or MDDHT. The LIQI series commonly uses model combinations such as MCDJT. Therefore, the nameplate alone is already sufficient to make a reliable identification: this is a Panasonic MINAS LIQI 750W servo drive.
This distinction is important for repair quotation, spare parts procurement, and technical diagnosis. Different Panasonic servo series may use different control interfaces, encoder protocols, motor matching rules, parameter software, and alarm definitions. If the drive is incorrectly treated as an A5 or A6 model, the technician may consult the wrong manual, select the wrong motor, misunderstand the alarm code, or follow an incorrect troubleshooting path.
2. Basic Electrical Parameters of the Panasonic MCDJT3220
Based on the nameplate, the main electrical specifications of this MCDJT3220 servo drive can be summarized as follows:
| Item | Specification |
|---|---|
| Brand | Panasonic |
| Product type | AC Servo Driver |
| Series | MINAS LIQI |
| Model | MCDJT3220 |
| Input power | Single-phase AC 220–240V |
| Input frequency | 50/60Hz |
| Input current | 6.6A |
| Output voltage | Three-phase 0–240V |
| Output current | 4.0A |
| Rated power | 750W |
| Matching motor | Panasonic LIQI series servo motor |
This is a 750W servo drive with single-phase 220V-class input and three-phase output for a servo motor. A common misunderstanding should be avoided here: although the input power is single phase, the output to the motor is still three-phase U/V/W. Inside the servo drive, the AC input is first rectified into a DC bus, and then the inverter stage generates three-phase PWM output for the servo motor.
Therefore, this drive should not be treated as a simple single-phase motor controller. It should also not be considered equivalent to an ordinary VFD. A servo system has not only a main power circuit and motor U/V/W output, but also a very important encoder feedback loop. If the encoder feedback is abnormal, the servo drive cannot operate normally even if the main power section is still healthy.
3. Alarm 49.0 Indicates the Encoder Feedback System Should Be the Primary Focus
In the customer’s video, the servo drive display appears to flash 49.0. According to Panasonic servo alarm logic, alarm 49.0 is generally related to encoder protection and is commonly described as:
Incremental Encoder CS Signal Error Protection
In practical terms, it can be understood as:
Incremental encoder CS signal error
or, more simply:
The encoder feedback signal is abnormal, and the servo drive cannot correctly read or identify the motor encoder feedback.
The key word here is encoder. The defining characteristic of a servo system is closed-loop control. The drive does not simply output voltage and current to the motor; it must also continuously receive feedback from the motor encoder to determine rotor position, speed, and direction. If the encoder feedback is incorrect, missing, unstable, or logically inconsistent, the drive cannot safely control the motor.
For this reason, alarm 49.0 should not be diagnosed first as a general “motor not running,” “drive power module failure,” or “IGBT failure” problem. The first diagnostic area should be the encoder feedback chain.
4. What Does an Encoder CS Signal Error Mean?
A servo motor usually has an encoder mounted at the rear end. The encoder converts the motor shaft position, speed, direction, and related feedback information into signals that are sent back to the servo drive. The servo drive uses this feedback for position loop, speed loop, and current loop control.
A CS signal error can be understood as an abnormality in encoder serial communication or status-check logic. During power-on or operation, the drive checks whether the encoder feedback data is valid. If the drive detects abnormal encoder data, communication check errors, missing signals, or logical inconsistency, it triggers encoder protection.
In actual repair work, an encoder CS signal error does not always mean that the encoder itself is definitely damaged. It only means that the drive is receiving abnormal encoder feedback. The root cause may be located anywhere in the feedback chain, including:
- Broken encoder cable;
- Poor contact at the encoder connector;
- Abnormal encoder power supply;
- Defective encoder inside the servo motor;
- Oil, water, or contamination entering the motor encoder section;
- Poor shielding or grounding of the encoder cable, causing electrical interference;
- Damaged X2 encoder interface on the drive;
- Damaged encoder receiving circuit inside the drive;
- Motor and drive mismatch;
- Incorrect wiring or modified encoder cable pin assignment.
Therefore, when facing alarm 49.0, the correct method is not to immediately replace the drive. The technician should isolate and check the feedback path step by step: drive → encoder cable → motor encoder.
5. Common Causes of Alarm 49.0
5.1 Encoder Connector Not Fully Inserted or Poor Pin Contact
This is one of the most common and easily overlooked causes in the field. After transportation, machine vibration, drive replacement, cable removal, or maintenance work, the encoder connector may become slightly loose. It may look inserted from the outside, but the locking mechanism may not be fully engaged, or one of the internal pins may not be making reliable contact.
After long-term use, oil, dust, moisture, oxidation, or contamination may also accumulate inside the connector. Encoder signals are low-voltage weak signals. Unlike main power wiring, a small amount of contact resistance or instability can already cause communication failure.
The technician should power off the equipment, wait for the servo drive to discharge, unplug the X2 encoder connector, and inspect the pins carefully. Look for bent pins, recessed pins, broken pins, blackened contacts, oil contamination, moisture, or corrosion. After inspection and cleaning, the connector should be fully inserted and locked before powering on again.
5.2 Internal Breakage or Intermittent Contact in the Encoder Cable
Servo motor encoder cables are usually multi-core cables with thin conductors and shielding. In machines using drag chains, reciprocating axes, robotic arms, feeding mechanisms, cutting axes, or moving carriages, encoder cables are repeatedly bent during operation. Over time, one or more internal conductors may break.
The difficult part is that the outer sheath may still look normal while an internal conductor is already cracked or intermittently open. The machine may work when stationary but alarm when the axis moves to a certain position. The alarm may also appear or disappear when the cable is lightly moved.
For this type of fault, visual inspection alone is not reliable. A multimeter can be used to check continuity pin by pin. During the continuity test, gently bend and move the cable, especially near the motor end, drag chain bending section, and connector root. If the resistance changes or the continuity jumps, the cable likely has an internal break or intermittent connection.
5.3 Abnormal Encoder Power Supply
The encoder normally requires a low-voltage supply from the servo drive, commonly 5V or another specified voltage depending on the system. If the encoder power supply is missing or pulled down, the drive cannot read encoder data correctly.
There are two typical types of encoder power supply problems.
The first type is that the drive does not output the encoder supply correctly. Possible internal causes include a damaged 5V supply circuit, protective resistor, regulator, fuse element, or related power component.
The second type is that the external encoder cable or encoder itself is shorted, pulling down the encoder power supply from the drive. In this case, if the technician replaces only the drive without identifying the external short, the replacement drive may still show the same alarm or may even suffer damage again.
During repair, the technician may disconnect the encoder cable and check whether the encoder supply voltage from the drive side returns to normal. Another effective method is to connect the drive to a known-good matching motor and encoder cable for comparison testing. When measuring the encoder connector, extreme care is required to avoid shorting adjacent pins with the meter probe. A megohmmeter or insulation tester must never be used on encoder signal lines, because the high test voltage can easily damage the encoder and the drive input circuit.
5.4 Defective Motor Encoder
If the encoder connector and cable are confirmed to be normal but alarm 49.0 remains, the motor encoder itself must be suspected. Servo motor encoder damage can be caused by many factors, including:
- Water entering the motor;
- Oil entering the encoder section;
- Mechanical impact on the motor rear cover;
- Aging of encoder electronic components;
- Heavy dust contamination;
- Poor shielding or grounding causing static discharge or interference damage;
- Hot-plugging the encoder cable;
- Long-term high-temperature operation causing encoder aging.
A defective encoder may cause an alarm immediately at power-on, or it may fail only after the motor warms up. A temperature-dependent encoder fault can be especially difficult to identify because the drive may work normally when cold and fail only after some operating time.
5.5 Motor and Drive Mismatch
A servo drive cannot be connected to any motor simply because the power rating appears similar. Different Panasonic servo series may use different encoder protocols, feedback resolution, signal formats, and motor identification logic. If the customer has replaced the motor, drive, or cable, it is essential to confirm that the motor model is compatible with the MCDJT3220 drive.
In field repair, this type of situation is very common. The original drive may have failed, and the customer may have found another drive with the “same power rating” as a replacement. Or the original motor may have been replaced by another motor with a similar appearance. For an ordinary VFD driving a three-phase induction motor, similar voltage and power ratings may sometimes be enough for a basic test. However, a servo system is different. If the encoder protocol or motor identification is not compatible, the drive may immediately alarm and refuse to run.
Therefore, when diagnosing alarm 49.0, the motor nameplate must also be checked. The technician should confirm the motor model, encoder type, and power rating, and verify that the motor is suitable for the MCDJT3220 LIQI drive.
5.6 Fault in the Drive’s Internal Encoder Interface Circuit
If a known-good matching motor and encoder cable are connected to the drive and alarm 49.0 still appears, then the internal encoder interface circuit of the drive becomes the main suspect.
The encoder interface circuit may include:
- Encoder power supply circuit;
- Input protection components;
- Differential receiver or serial communication interface IC;
- Pull-up and pull-down resistors;
- Filtering capacitors;
- Optocouplers or isolation components;
- MCU or control-chip input section.
This part of the circuit is a weak-signal processing circuit and can be damaged by external short circuits, hot-plugging, incorrect encoder wiring, electrostatic discharge, water corrosion, or contamination. Once the encoder interface circuit is damaged, the main power stage of the servo drive may still be normal, but the drive will still alarm because it cannot read the motor feedback.
In such a case, the technician should not focus only on measuring the IGBT or the DC bus voltage. For alarm 49.0, the diagnostic focus should be the X2 encoder interface and its related receiving circuit.
6. Recommended Field Troubleshooting Procedure
When dealing with this alarm, it is best to follow a structured troubleshooting procedure instead of immediately disassembling the drive or replacing expensive components.
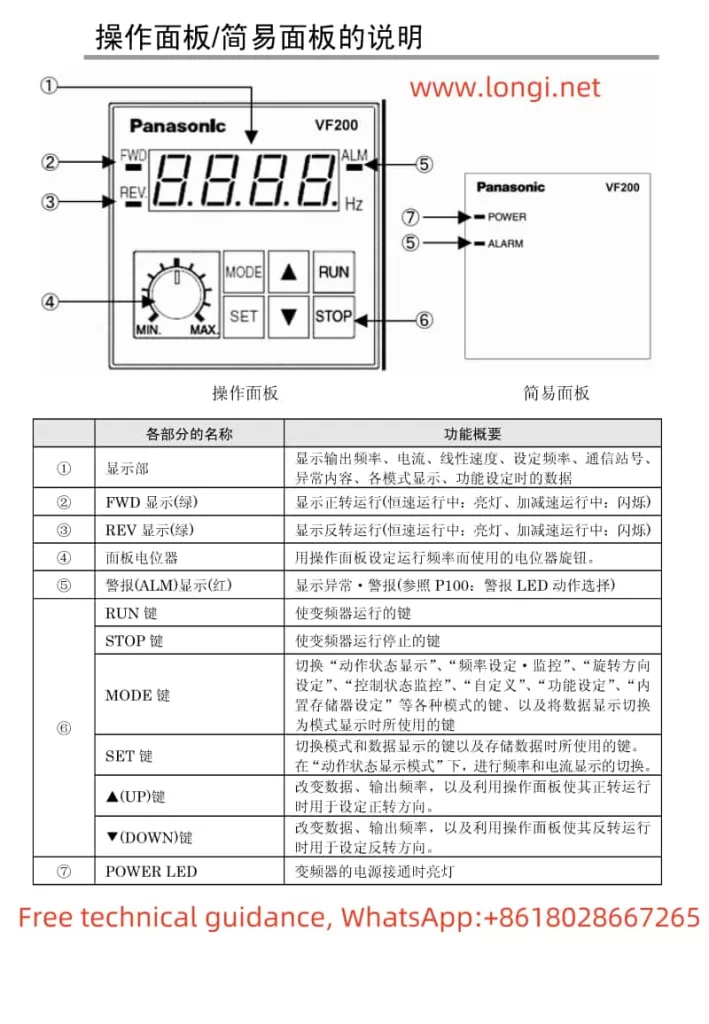
Step 1: Confirm That the Alarm Code Is Really 49.0
First, observe the display carefully and confirm that the code is indeed 49.0, not 4.9, 49, E49, or another similar-looking code. Some servo drive displays are small, and a flashing video can easily lead to misreading. Ask the customer to take a clear still photo or record a close-up video of the display.
Correct alarm identification is critical because different alarm codes lead to completely different diagnostic paths. Overvoltage, overcurrent, undervoltage, overload, encoder fault, and excessive position deviation are all different types of faults.
Step 2: Confirm the Drive Model and Motor Model
Check the drive nameplate and confirm that the model is MCDJT3220. Then ask the customer to provide a clear photo of the servo motor nameplate. Confirm whether the motor belongs to the correct Panasonic LIQI matching series.
If the motor model cannot be confirmed, the diagnosis remains incomplete. This is especially important if the customer has replaced the motor or drive before the alarm appeared.
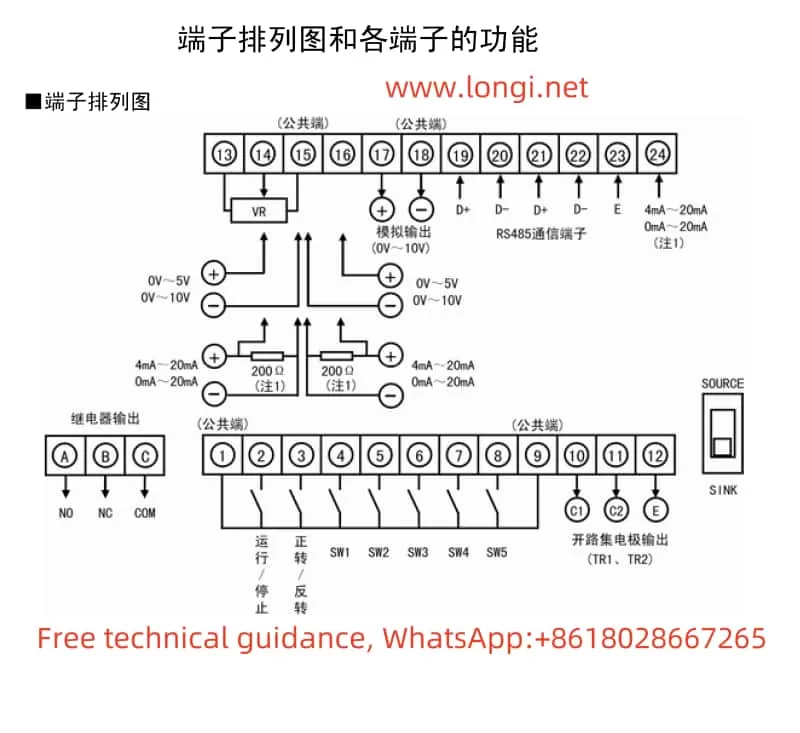
Step 3: Power Off and Reinsert the X2 Encoder Connector
Turn off the main power and wait until the internal capacitors of the servo drive have discharged. Then unplug the X2 encoder connector. Inspect the connector and socket carefully for abnormal pins, contamination, corrosion, loose contact, or mechanical damage. After cleaning and inspection, reinsert the connector firmly and power on again to check whether the alarm disappears.
Servo drives contain a high-voltage DC bus internally. Do not touch the terminals immediately after power-off. Always wait for proper discharge time and follow safety procedures.
Step 4: Inspect the Encoder Cable
Check the encoder cable for visible damage, cuts, crushing, pulling, oil contamination, or water ingress. If the machine uses a drag chain, pay special attention to the bending section. If the alarm changes when the cable is gently moved, an intermittent cable fault is very likely.
If possible, the fastest method is to replace the encoder cable with a known-good cable of the same type.
Step 5: Perform Cross Testing
Cross testing is one of the most effective methods in servo repair.
If there is another identical machine or compatible servo system on site, connect the suspected drive to a known-good motor and encoder cable. Alternatively, connect a known-good drive to the original motor and encoder cable.
The judgment logic is as follows:
- If the fault follows the motor and encoder cable, the motor encoder or cable is faulty;
- If the fault follows the drive, the drive’s internal encoder interface is faulty;
- If replacing the encoder cable solves the problem, the encoder cable is faulty;
- If replacing the motor solves the problem, the motor encoder is faulty;
- If replacing the drive solves the problem, the drive interface circuit is faulty.
Cross testing is more reliable than simple measurement because encoder signals are high-speed or serial weak signals. Some problems cannot be clearly detected with a standard multimeter.
Step 6: Measure the Encoder Power Supply
If the technician has proper electrical repair experience, the encoder supply voltage can be measured. If the encoder supply voltage is abnormally low, disconnect the encoder cable and measure again.
If the supply voltage returns to normal after disconnecting the encoder cable, the external cable or motor encoder may be shorted. If the supply voltage is still missing after the encoder cable is disconnected, the drive’s internal encoder power supply circuit may be faulty.
When measuring the encoder connector, avoid shorting the pins. Do not use a high-voltage insulation tester on encoder lines.
Step 7: Check Shielding, Grounding, and Interference
If the alarm does not appear immediately at power-on but occurs intermittently during operation, the technician should also consider electrical interference. In a servo system, the U/V/W motor power cable is a strong noise source, while the encoder cable carries weak feedback signals. These two cables should not be routed closely in parallel over a long distance.
The encoder cable should be an original or high-quality shielded cable, and the shielding should be grounded according to proper practice. If the customer has extended the encoder cable, replaced it with an ordinary multi-core cable, or routed it near power wiring, the probability of alarm 49.0 increases significantly.
7. Difference Between Alarm 49.0 and Main Power Circuit Faults
Many customers see a servo drive alarm and immediately assume that the drive is damaged or that the power module has failed. However, from a repair perspective, it is necessary to distinguish the type of alarm.
If the problem is related to the IGBT module, output short circuit, overcurrent, DC bus overvoltage, braking circuit, or current detection circuit, the alarm code will usually point toward the power circuit or current feedback circuit. Alarm 49.0, on the other hand, points toward encoder feedback. In many cases, the drive may not even begin high-power output before the alarm is generated during power-on self-check or before servo enable.
In other words, alarm 49.0 does not primarily indicate:
- IGBT failure;
- Motor winding short circuit;
- Braking resistor failure;
- Main capacitor failure;
- Rectifier bridge failure.
These parts are not impossible to fail, but based on the alarm logic, they should not be the first diagnostic priority. The encoder feedback system should be checked first. Starting with IGBT removal or main circuit testing may waste time and may not address the real fault.
8. Diagnostic Priorities Based on Different Symptoms
8.1 Alarm 49.0 Appears Immediately at Power-On
If the drive displays 49.0 immediately after power-on, before running or servo enable, the most likely causes include:
- Encoder connector not properly inserted;
- Broken encoder cable;
- Encoder supply voltage shorted or missing;
- Defective motor encoder;
- Motor and drive mismatch;
- Damaged encoder interface circuit inside the drive.
This type of fault is usually stable and can often be located by connector inspection, cable replacement, and cross testing.
8.2 Alarm 49.0 Appears After Servo Enable
If the drive powers on normally but alarms after servo enable, the technician should consider encoder data reading, motor identification, feedback validity, and parameter compatibility. Possible causes include:
- Poor encoder signal quality;
- Motor and drive parameter mismatch;
- Partial failure in the encoder signal channels;
- Failure when the drive attempts to read motor feedback data.
8.3 Alarm 49.0 Appears After Running for Some Time
If the equipment can run but alarms after some operating time, the main suspects are:
- Intermittent break inside a drag-chain cable;
- Motor encoder failure after heating;
- Vibration causing momentary connector contact loss;
- Encoder cable interference from nearby power wiring;
- Cable tension when the axis moves to a certain position.
This type of fault is best diagnosed dynamically. Run the axis at low speed while observing the cable bending sections, or move the axis position and gently move the cable while watching whether the alarm appears or clears.
9. Safety Precautions During Repair
Servo drive repair involves both high-voltage power circuits and low-voltage signal circuits. The drive has 220V AC input and an internal high-voltage DC bus. The following precautions are essential:
First, do not touch main circuit terminals immediately after power-off. The internal capacitors need time to discharge.
Second, do not hot-plug the encoder cable. The encoder interface is a weak-signal electronic interface. Hot-plugging may generate transient voltage spikes and damage either the encoder or the drive interface IC.
Third, do not use a megohmmeter on encoder lines. An insulation tester is suitable for checking motor winding insulation to ground, but not for encoder signal wires. Encoder wires are connected directly to electronic circuits, and high test voltage can destroy them.
Fourth, do not randomly modify the encoder cable pinout. Servo encoder wiring is not ordinary control wiring. Pin assignment, shielding, twisted pairs, and grounding all matter. Incorrect modification may cause alarms or damage the interface circuit.
Fifth, when measuring the encoder connector, prevent probe slips and pin short circuits. Encoder connector pins are often dense. A brief short between 5V, signal, and ground pins may create a new fault.
10. Repair Communication and Quotation Suggestions
For a repair service provider, it is not professional to simply tell the customer “the drive is bad” or “the motor is bad” when alarm 49.0 appears. A better explanation is that the current alarm points to the encoder feedback chain, and further testing is required to locate the exact faulty part.
A suitable communication process is:
- Confirm the drive model and alarm code;
- Explain that the drive is a LIQI series unit, not an A5 or A6 drive;
- Explain that alarm 49.0 is an encoder feedback signal fault;
- Ask the customer for the motor nameplate, encoder cable photos, and X2 connector photos;
- Ask the customer to reinsert the encoder connector and inspect the cable;
- If possible, perform cross testing with a known-good matching motor, cable, or drive;
- Determine whether the fault is in the motor encoder, encoder cable, or drive interface circuit.
This approach is more professional and helps avoid misunderstanding. In particular, if the customer sends only the drive for repair but keeps the motor and encoder cable on site, the repair provider should explain that if the real fault is in the motor encoder or cable, repairing the drive alone will not solve the on-site alarm.
11. Information the Customer Should Provide
To improve diagnostic accuracy, the customer should provide the following information:
- Full front photo of the servo drive;
- Clear drive nameplate photo;
- Servo motor nameplate photo;
- Close-up photo of the X2 encoder connector;
- Photos of both ends of the encoder cable;
- Power-on alarm video;
- Whether the alarm appears immediately at power-on, after servo enable, or during operation;
- Whether the drive, motor, or cable has been replaced before;
- Whether the machine has experienced water ingress, oil contamination, impact, cable damage, or drag-chain failure;
- Whether there is another identical machine available for cross testing.
The more complete the information, the more accurate the fault judgment will be.
12. Conclusion
The Panasonic MCDJT3220 is a MINAS LIQI series 750W AC servo drive with single-phase 220–240V input and three-phase 0–240V output. It is not a MINAS A5 or MINAS A6 drive. The customer’s video appears to show alarm 49.0, which should be understood as an encoder feedback abnormality, commonly related to incremental encoder CS signal error protection.
The troubleshooting focus should not begin with the IGBT, rectifier bridge, braking resistor, or main capacitor. Instead, it should focus on the following chain:
Drive X2 encoder interface → encoder cable → motor encoder → encoder power supply and receiving circuit.
In practical repair work, the most effective method is to inspect the connector and cable first, then perform cross testing among the drive, encoder cable, and motor. If the alarm disappears after connecting a known-good matching motor and encoder cable, the original motor encoder or cable is faulty. If the alarm remains, the drive’s internal encoder interface circuit is likely damaged.
For technicians and service engineers, the key point is this: when alarm 49.0 appears on this Panasonic servo drive, do not immediately assume that the power module is defective. A servo system is a closed-loop control system, and encoder feedback is the foundation of operation. If the encoder feedback is invalid, the drive will protect itself even when the main power circuit is still normal. Correct model identification, accurate alarm interpretation, and systematic feedback-chain troubleshooting are the most important steps for solving this type of Panasonic servo fault.