In field maintenance work, we often encounter situations where equipment displays fault codes that are not documented in the user manual. This is especially common with domestic brands or cloned inverters. This article details the entire process of diagnosing and repairing a ZHZK ZK880-N series inverter that first displayed an ERR23 fault (ground short circuit), and after repairs, encountered an ERR42 fault (speed deviation too large). Through fault code analysis and comparative research, we uncover the significant similarities between this inverter and the Inovance MD380 series and explore the logic issues that arise.
1. Equipment Background
The inverter was applied in an industrial fan system at a factory, used for speed control and energy saving. After years of operation, the equipment suddenly failed and displayed ERR23. The user tried replacing the motor without success, and then entrusted our team with on-site diagnosis and repair.

2. First Fault: ERR23 — Ground Short Circuit
1. Fault Symptom
The inverter powered on and passed self-check, but tripped with an ERR23 alarm immediately upon startup. The motor did not rotate, and no output current was detected.
2. Fault Analysis
Based on experience, ERR23 typically indicates a ground short caused by:
- Motor winding insulation breakdown
- Damaged or damp output cables
- Internal failure of power components (IGBT)
3. Troubleshooting and Repair
- Insulation Testing: Used a megohmmeter to check insulation between U/V/W and ground — >200MΩ, confirmed normal; cables also intact.
- Output Voltage Check: Powered on without load and checked inverter output with an oscilloscope — no PWM waveform, indicating power circuit issues.
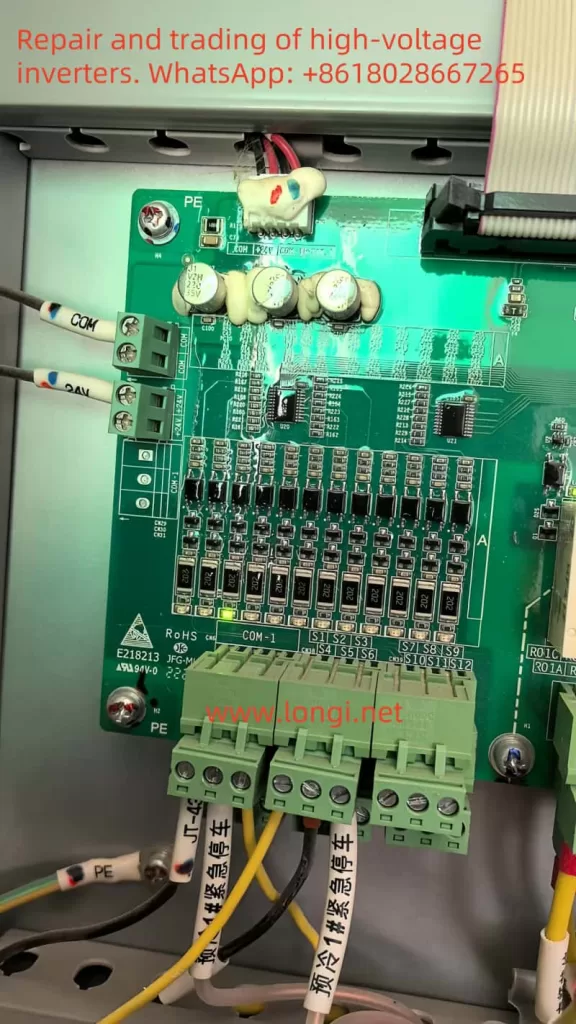
- Drive Board Check: Found burn marks on the drive board; further inspection confirmed IGBT failure.
- Component Replacement: Replaced IGBT module and repaired burned-out optocouplers and resistors in the drive circuit.
- Testing: Simulated load in factory conditions — inverter output normal, PWM stable, fan rotates properly.
ERR23 fault was successfully resolved.
3. Post-Repair Fault: ERR42 — Speed Deviation Too Large
1. On-Site Issue
After reinstalling at the user site, the inverter powered on and passed self-check. Upon startup, it ran for about 1–2 seconds and then tripped with ERR42.
2. Confusion and Clue
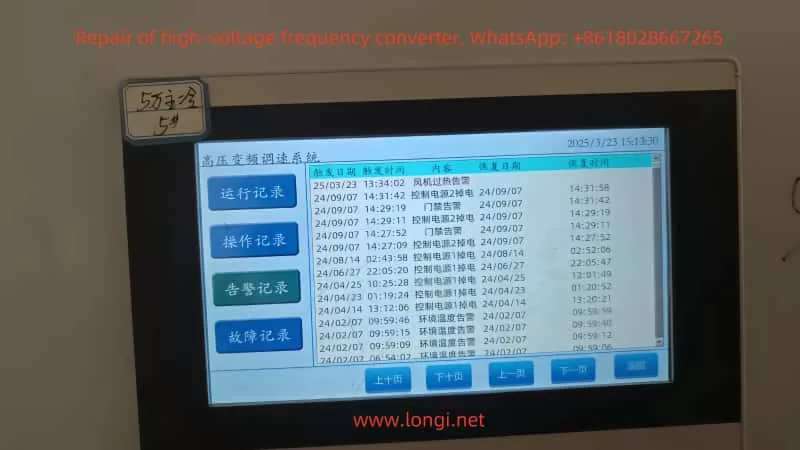
The ZHZK manual did not mention ERR42, leaving no immediate path forward. We pursued two directions:
- First, determine if it was a false alarm — due to interference or wiring.
- Second, check for hidden parameters or compatibility issues — given the extremely brief manual.
3. Comparative Breakthrough — Inovance MD380
An engineer noticed that the ZHZK ZK880-N closely resembled the Inovance MD380 series in appearance, menus, and parameter structures. We referenced the MD380 manual and found:
ERR42: Speed deviation too large.
Applies when using encoder feedback in vector control (F0-01=1), and actual speed deviates significantly from target.
But the parameter F0-01 was set to 0, i.e., sensorless vector control (SVC), where no encoder feedback is involved. Logically, such an error shouldn’t occur in this mode.
4. Validation Through Trial and Error
We tested by changing F0-01 from 0 to 2 — i.e., switching to V/F control mode.
- Upon restart, the inverter operated normally.
- ERR42 no longer occurred.
This confirmed that:
- Although ERR42 should only trigger in closed-loop vector control, ZHZK’s firmware retained some residual logic from MD380, allowing the error even in SVC mode.

5. ZHZK ZK880-N vs. Inovance MD380 — An In-Depth Comparison
Several clues support that ZHZK is a cloned or customized variant of Inovance:
- Parameter numbering identical: Including F0-01, F9 group, etc.
- Fault codes mostly match: Even undocumented ZHZK codes behave like MD380 ones.
- Hardware layout extremely similar: IGBT drive and control board layout nearly identical.
- UI and navigation same: Menu structure, key functions, and parameter copy behavior identical.
Conclusion: ZHZK ZK880-N is highly likely based on early Inovance versions — a rebranded or cut-down variant, with leftover logic causing such confusion.
6. Key Repair Takeaways
- Don’t rely solely on manuals when fault codes are missing: Look at similar products.
- SVC mode in clone inverters is often unstable: Recommend V/F for reliability.
- Always document parameters and take screenshots: Helps future diagnostics.
- Validate by logic and testing: ERR42 was resolved by matching control logic with firmware behavior.
7. Conclusion
This case shows that engineers must go beyond the manual when diagnosing inverter faults — especially for custom or generic brands. The transition from ERR23 to ERR42 and its resolution illustrates the importance of comparative research, logical reasoning, and on-site validation.
For clone or OEM-modified inverters, avoid complex control modes like vector control unless absolutely necessary. Simplicity brings reliability in harsh field environments.
This process exemplifies how practical engineering insight bridges the gap between unknown errors and restored operation.