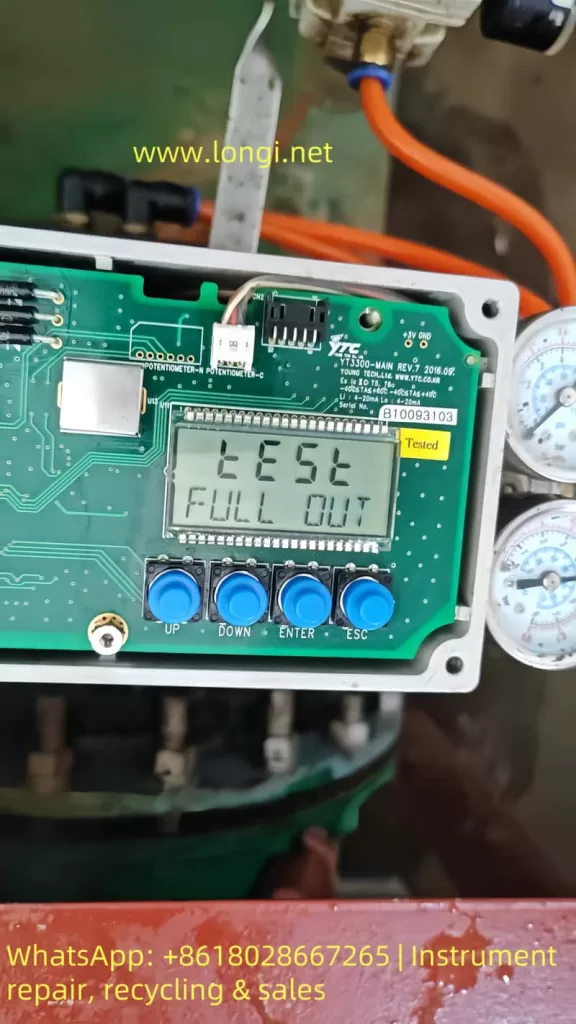
This report addresses the status display of the Rotork YTC YT-3300 RDn 5201S smart valve positioner. The front panel shows the following:
TEST
FULL OUT
7535
The YT-3300 series smart positioner is produced by YTC (Young Tech Co., Ltd.), often labeled under the Rotork brand. It is designed for precise valve actuator control using a 4–20 mA input signal. The unit supports automatic calibration, self-diagnostics, manual testing, and performance optimization.
II. Interpretation of Display Information
1. TEST Mode
The “TEST” message indicates the unit is currently in self-test or calibration mode. This occurs typically during initial power-up, after parameter reset, or when manually triggered.
2. FULL OUT
“FULL OUT” means the actuator has moved to the end of its travel range—either fully open or fully closed—depending on the configured logic.
3. 7535
The number “7535” is not an error code. It usually represents the raw feedback signal from the internal position sensor, such as a potentiometer or encoder, scaled between 0–9999. This value gives the current travel position.
III. Possible Root Causes
The following table summarizes possible causes for this status:
No.
Possible Cause
Description
1
Power-on self-test
After powering up or parameter loss, the device automatically initiates self-calibration.
2
Manual test triggered
The test mode may have been manually entered via front-panel buttons.
3
Feedback sensor issue
A stuck or damaged position sensor can cause the value (7535) to freeze or become invalid.
4
Air pressure problem
Insufficient or unstable air pressure may prevent the actuator from completing movement.
5
Mainboard fault
Malfunction of internal controller or microprocessor may lock the unit in test mode.
IV. Recommended Inspection and Repair Steps
1. Safety and Initial Checks
Disconnect the actuator from live control and ensure safe access.
Ensure that air pressure is fully vented to prevent unintended valve motion.
Confirm the unit is grounded properly (ground resistance <100 ohms).
2. Check Air Supply
Verify pressure gauges show clean, dry air within 0.14–0.7 MPa (1.4–7 bar).
Check for blocked air tubing or clogged filters.
3. Exit TEST Mode
Press the ESC button repeatedly to try returning to the RUN display.
If that fails, power cycle the unit and enter Auto Calibration mode via the front panel.
4. Execute Auto Calibration
Set the A/M switch to AUTO.
Use the keypad to navigate to “AUTO CAL” or “AUTO2 CAL” and execute.
The actuator will automatically stroke to both ends and calibrate zero and full travel points.
After successful calibration, the display should return to RUN mode.
5. Verify Position Feedback
If the value “7535” remains static or fails to reflect position changes:
Open the lower cover and check wiring to the potentiometer (typically yellow, white, blue wires).
Measure the feedback voltage (should range from ~0.5 to 4.5V DC).
If no variation is detected with actuator movement, the potentiometer or sensor board may need replacement.
6. Diagnostics and Alarm Monitoring
Enter the DIAGNOSTIC menu to check for alarm codes or travel deviation alerts.
If high or low limit alarms (e.g., HH ALRM or LL ALRM) are detected, reset as per standard procedures.
7. Functional Test and Tuning
After restoring to RUN mode, input varying mA signals and observe feedback value (PV) changes accordingly.
If actuator motion is slow or unstable, adjust Dead-Zone, Gain, or Filter settings to fine-tune performance.
Conduct partial stroke tests (PST) if available to verify control reliability.
V. Evaluation and Conclusion
Depending on the inspection and action taken, the following scenarios are possible:
If Auto Calibration completes successfully and feedback changes smoothly: No hardware failure is present. The unit was simply in test mode after reset.
If TEST mode persists and feedback value remains frozen: The position feedback sensor or its circuit is likely faulty and needs replacement.
If actuator fails to move despite calibration attempts: Check for blocked pneumatic valves, damaged tubing, or insufficient pressure.
If diagnostic menu shows active alarms: Follow alarm-specific reset instructions.
VI. Summary and Recommendations
Preliminary Conclusion: The current “TEST / FULL OUT 7535” status likely indicates a post-reset auto-test, not a malfunction. However, persistent status or failed calibration points to feedback or hardware problems.
Recommended Actions:
First attempt to complete auto calibration;
Check wiring, feedback sensor, and air supply;
Monitor diagnostic menu for error indicators;
Replace faulty components if auto-calibration cannot be completed.
Follow-up Advice:
Acquire the official user manual for this specific model;
Record all air pressures, input/output values, alarms, and parameter settings during troubleshooting for future analysis;
If manual steps do not resolve the issue, contact the manufacturer or authorized support for further diagnostics or part replacement.
The Anchuan G9300 series frequency inverter is a high-performance vector inverter widely used in various industrial automation applications. This article will provide a detailed introduction to the operation panel functions, parameter settings, password management, external terminal control, and fault codes and their solutions for the G9300 series frequency inverter, helping users better understand and utilize this equipment.
1. Operation Panel Function Introduction
The operation panel of the Anchuan G9300 series frequency inverter is designed to be simple and functional, mainly consisting of the following parts:
Display Screen: Used to display current operating status, parameter settings, and other information.
Function Keys: Include PRG (Programming Key), ENTER (Confirm Key), SHIFT (Shift Key), RUN (Start Key), STOP/RST (Stop/Reset Key), and MF.K (Multi-Function Key).
Increment and Decrement Keys: Used to adjust parameter values or browse menus.
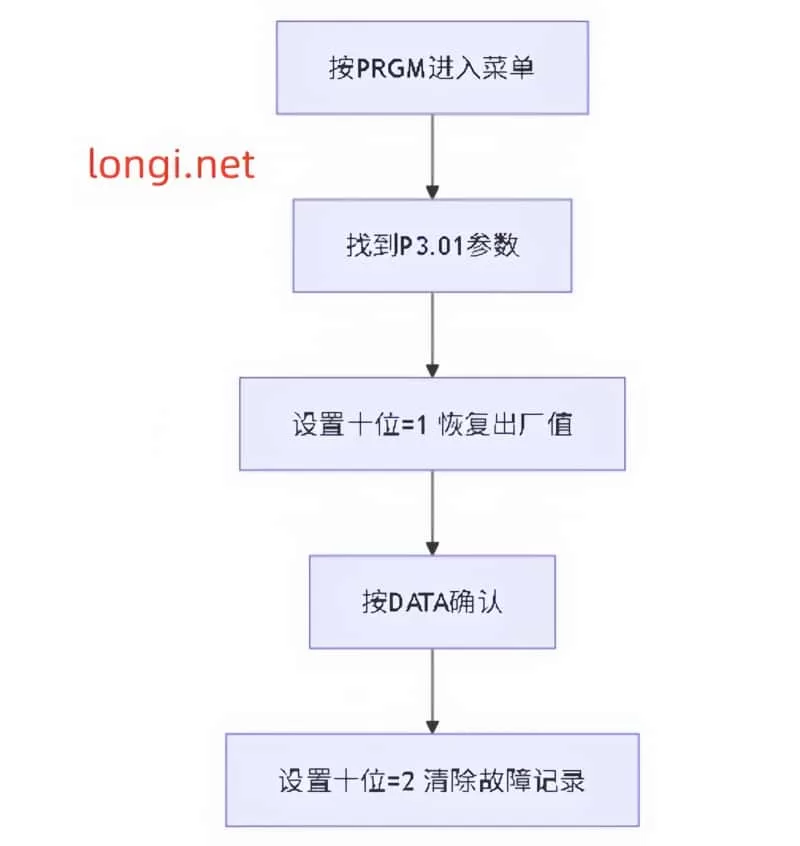
1.1 Restoring Factory Settings
Before using the G9300 series frequency inverter, it is usually necessary to restore the parameters to factory settings to ensure the device is in a known state. Here are the steps to restore factory settings:
Enter Parameter Setting Mode: Press the PRG key to enter the first-level menu, then press the ENTER key to enter the second-level menu.
Select Parameter Initialization Function: In the second-level menu, find the PP-01 (Parameter Initialization) function code.
Restore Factory Parameters: Set PP-01 to 1, then press the ENTER key to confirm. At this point, all parameters of the frequency inverter will be restored to factory settings.
1.2 Setting and Removing Passwords
To protect parameter settings from being arbitrarily changed, the G9300 series frequency inverter provides a password protection function. Here are the steps to set and remove passwords:
Setting a Password:
Enter the parameter setting mode and find the P7-11 (User Password) function code.
Set P7-11 to the desired password value (range 0~32766), then press the ENTER key to confirm.
Removing a Password:
Enter the parameter setting mode and find the P7-11 function code.
Set P7-11 to 0, then press the ENTER key to confirm, and the password will be removed.
1.3 Parameter Access Restrictions
To further protect parameter settings, the G9300 series frequency inverter also provides a parameter locking function. Here are the steps to set parameter access restrictions:
Locking Parameters:
Enter the parameter setting mode and find the PP-04 (Parameter Lock) function code.
Set PP-04 to 1, then press the ENTER key to confirm. At this point, all parameters will be locked and cannot be changed.
Unlocking Parameters:
Enter the parameter setting mode and find the PP-04 function code.
Set PP-04 to 0, then press the ENTER key to confirm, and the parameter lock will be removed.
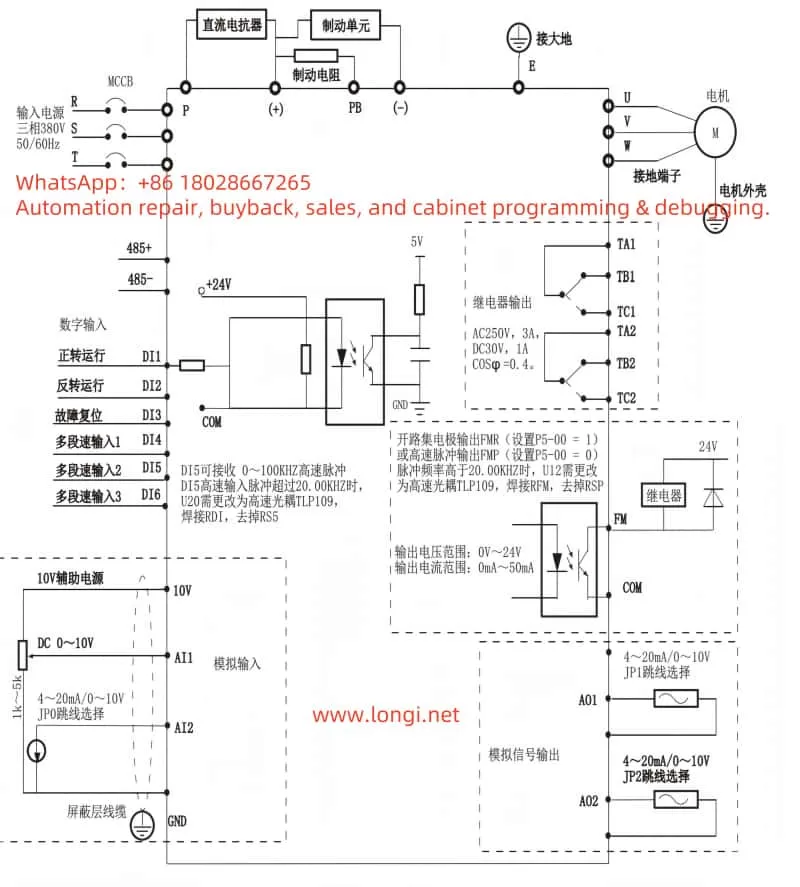
2. External Terminal Forward/Reverse Control and External Potentiometer Speed Regulation
The G9300 series frequency inverter supports forward/reverse control and potentiometer speed regulation through external terminals, making it very flexible and convenient in industrial automation control.
2.1 External Terminal Forward/Reverse Control
To achieve external terminal forward/reverse control, the following wiring and parameter settings are required:
Wiring:
Connect the forward control signal to the DI1 terminal.
Connect the reverse control signal to the DI2 terminal.
Ensure the ground terminal (GND) is correctly connected.
Parameter Settings:
Enter the parameter setting mode and find the P4-00 (DI1 Terminal Function Selection) and P4-01 (DI2 Terminal Function Selection) function codes.
Set P4-00 to 1 (Forward Operation), and P4-01 to 2 (Reverse Operation), then press the ENTER key to confirm.
2.2 External Potentiometer Speed Regulation
To achieve external potentiometer speed regulation, the following wiring and parameter settings are required:
Wiring:
Connect the output of the potentiometer to the AI1 terminal.
Ensure the ground terminal (GND) is correctly connected.
Parameter Settings:
Enter the parameter setting mode and find the P0-03 (Main Frequency Source A Selection) function code.
Set P0-03 to 4 (Keypad Potentiometer), then press the ENTER key to confirm.
3. Fault Codes and Their Solutions
During the use of the G9300 series frequency inverter, various faults may be encountered. Here are some common fault codes and their solutions:
Fault Code
Fault Description
Solution
E001
IGBT Short Circuit Fault
Check the IGBT module and its drive circuit, replace the IGBT module if necessary.
E002
Acceleration Overcurrent
Check if the acceleration time setting is too short or if the load is too large, adjust the acceleration time or reduce the load.
E003
Deceleration Overcurrent
Check if the deceleration time setting is too short or if the load is too large, adjust the deceleration time or reduce the load.
E004
Constant Speed Overcurrent
Check if the load is too large or if the motor parameters are set correctly, reduce the load or reset the motor parameters.
E005
Acceleration Overvoltage
Check if the acceleration time setting is too short or if the bus voltage is too high, adjust the acceleration time or check the bus voltage.
E006
Deceleration Overvoltage
Check if the deceleration time setting is too short or if the bus voltage is too high, adjust the deceleration time or check the bus voltage.
E007
Constant Speed Overvoltage
Check if the bus voltage is too high or if the load is too small, adjust the bus voltage or increase the load.
E008
Stop Overvoltage
Check if the stop mode setting is correct or if the bus voltage is too high, adjust the stop mode or check the bus voltage.
E009
Undervoltage
Check if the input voltage is normal or if the power line is in good contact, ensure the input voltage is stable.
E010
Inverter Overload
Check if the load is too large or if the heat dissipation is good, reduce the load or improve the heat dissipation conditions.
E011
Motor Overload
Check if the motor load is too large or if the heat dissipation is good, reduce the load or improve the heat dissipation conditions.
E012
Input Phase Loss
Check if the input power supply is missing a phase, ensure all three phases are normally powered.
E013
Output Phase Loss or Three-Phase Output Imbalance
Check if the output line is normal, ensure the three-phase output is balanced.
E014
Module Overheat
Check if the heat sink is blocked or if the ambient temperature is too high, ensure good heat dissipation.
E015
External Fault
Check if the external control line is normal, ensure the external control signal is correct.
E016
Communication Abnormality
Check if the communication line is normal or if the communication parameters are set correctly, ensure stable communication.
E017
Motor Tuning Abnormality
Check if the motor parameters are set correctly, re-perform motor tuning.
E018
Parameter Read/Write Abnormality
Check if the parameter settings are correct, reset the parameters.
E019
Inverter Hardware Abnormality
Check if the inverter hardware is normal, contact after-sales service if necessary.
E020
Motor Ground Short Circuit
Check if the motor line is short-circuited, ensure the motor insulation is good.
E021
AD Zero Drift Too Large
Check if the analog input circuit is normal, contact after-sales service if necessary.
Check if the inverter hardware is normal, contact after-sales service if necessary.
E023
Motor Ground Short Circuit
Check if the motor line is short-circuited, ensure the motor insulation is good.
E024
AD Zero Drift Too Large
Check if the analog input circuit is normal, contact after-sales service if necessary.
E025
User-Defined Fault 1
Check if the setting of user-defined fault 1 is correct, ensure the logic is correct.
E026
User-Defined Fault 2
Check if the setting of user-defined fault 2 is correct, ensure the logic is correct.
E027
Power-On Time Reached
Check if the power-on time setting is correct, adjust the power-on time appropriately.
E028
PID Feedback Disconnection Fault
Check if the PID feedback line is normal, ensure the feedback signal is stable.
E029
PID Feedback Overlimit (Overvoltage) Fault
Check if the PID feedback signal is too large, adjust the PID parameters appropriately.
E030
Keypad STOP Key Stop Fault
Check if the STOP key is normal, ensure the control logic is correct.
E031
Hardware Current Limit Timeout
Check if the current limit setting is correct or if the load is too large, adjust the current limit parameters or reduce the load.
E032
Auto-Reset Count Exceeded
Check if the auto-reset count setting is correct, adjust the reset count appropriately.
4. Conclusion
The Anchuan G9300 series frequency inverter is a powerful and high-performance industrial automation device. Through this article, users can better understand and use this equipment, including operation panel functions, parameter settings, password management, external terminal control, and fault codes and their solutions. In practical applications, users should perform parameter settings and fault troubleshooting according to specific needs to ensure the stable operation and high efficiency of the equipment.
It is hoped that this article can help users better master the usage methods of the Anchuan G9300 series frequency inverter and improve the efficiency and quality of industrial automation control.
The K-DRIVE KD600M series variable frequency drive (VFD) is a powerful and versatile device designed for motor speed and torque control in various industrial applications. This guide, based on the K-DRIVE KD600M series user manual, provides a detailed overview of the operation panel functions, parameter initialization, password and parameter access restrictions, external terminal forward/reverse control and potentiometer speed adjustment, as well as common fault codes and their resolutions. By mastering these features, users can operate and maintain the VFD efficiently and safely, ensuring optimal performance across different scenarios.
Operation Panel Functions
The KD600M series VFD’s operation panel is the central interface for user interaction, integrating intuitive buttons, LED indicators, and a 5-digit display for parameter settings, status monitoring, and motor control. Below are the key functionalities:
Buttons and Controls
The panel includes the following buttons:
PRG: Enters programming mode to access parameter menus.
ESC: Exits the current menu or cancels an operation.
OK: Confirms parameter settings or selections.
RUN: Starts motor operation.
STOP: Stops motor operation or resets faults.
QUICK: Quickly sets commonly used parameters.
JOG: Enters jog mode for testing or fine-tuning.
UP/DOWN: Adjusts parameter values or navigates menus.
For example, to adjust the frequency from 0.00Hz to 5.00Hz, users can press PRG to enter the parameter menu, use the UP/DOWN keys to select the target parameter (e.g., P1-04), input the new value, and press OK to confirm.
LED Indicators
The panel’s LED indicators provide real-time status feedback:
RUN: Green, on indicates running, off indicates stopped, flashing indicates sleep mode.
L/D/C: Red, off indicates panel control, on indicates terminal control, flashing indicates communication control.
FWD/REV: Red, off indicates forward, on indicates reverse, flashing indicates direction mismatch.
TUNE/TC: Red, on indicates torque control, flashing indicates tuning or a fault.
Display Screen
The 5-digit LED display shows frequency, current, voltage, fault codes, and other information. Hexadecimal values are prefixed with “H.” (e.g., P7-29 displays as “H.3f”). The display supports multi-level menu navigation (group → code → value), enabling quick access and modification of parameters.
Related Parameters
Key parameters related to operation panel functions include:
P7-00 (Jog Run Frequency): Range: 0.00Hz to maximum frequency; Factory default: 6.00Hz.
These features make the operation panel a powerful and flexible tool for various control needs.
Parameter Initialization
Parameter initialization is a critical step for restoring default settings or backing up user configurations. The KD600M series offers the following function codes:
P0-28 (Parameter Initialization)
Options:
0: No operation
1: Restore factory settings (excludes motor parameters, records, and P0-20)
2: Clear records
3: Back up user parameters
4: Restore backed-up parameters
Factory Default: 0
Modifiable State: Running state (★)
To perform initialization, users should enter P0-28 while the device is stopped, set it to 1, and confirm. The VFD will revert to factory settings, preserving motor parameters and run records.
P0-29 (Parameter Upload/Download)
Options:
0: No function
1: Upload parameters
2: Download parameters (excludes P4 and A1)
3: Download parameters (includes P4 and A1)
4: Download all parameters
5-7: Download modified parameters
Factory Default: 0
Modifiable State: Stopped or running state (☆)
This function allows users to back up custom parameters or restore from a backup, suitable for multi-device configurations or fault recovery.
Password and Parameter Access Restrictions
To prevent unauthorized modifications, the KD600M series provides password protection and parameter access restrictions:
Password Protection
P7-49 (User Password):
Range: 0 to 65535
Factory Default: 0
PF.00 (Factory Password):
Range: 0 to 65535
Factory Default: ***** (hidden for security)
Users can enable password protection by setting P7-49. Fault codes like Err25 (EEPROM read/write failure) or Err1A (password entry limit exceeded) may indicate password-related issues, requiring EEPROM chip inspection or technical support.
Parameter Access Restrictions
B0-00 (Function Code Read-Only Selection):
0: Invalid (no restriction)
1: Read-only (parameters cannot be modified)
Factory Default: 0
Parameter Status:
★: Not modifiable during operation (e.g., P0-03: motor control).
○: Manufacturer-only modification.
●: Read-only (e.g., PF group parameters).
These restrictions ensure the security of critical parameters, preventing accidental changes or unauthorized access.
External Terminal Forward/Reverse Control and Potentiometer Speed Adjustment
The KD600M series supports external terminal control for forward/reverse operation and potentiometer speed adjustment, ideal for automated systems.
Forward/Reverse Control
Digital Input Terminals (DI1-DI10):
DI1: Default forward (function code 1).
DI2: Default reverse (function code 2).
Supports PNP/NPN modes, switchable via DIP switches.
Up to 10 digital inputs with optional IO1/IO2 expansion cards.
P5-11 (Terminal Command Mode):
0: Two-wire mode 1
1: Two-wire mode 2
2: Three-wire mode 1
3: Three-wire mode 2
Factory Default: 0
Wiring Method:
Connect DI1 and DI2 to a PLC or switch, with the COM terminal as the common return.
Ensure secure connections to avoid short circuits or poor contact.
Potentiometer Speed Adjustment
Analog Input Terminals (AI1, AI2):
Supports 0-10V or 4-20mA input.
P5-15 (AI1 Minimum Input): Range: 0.00V to 10.00V; Corresponding setting: -100.0% to 100.0%.
P5-16 (AI1 Maximum Input): Range: 0.00V to 10.00V; Corresponding setting: -100.0% to 100.0%.
Wiring Method:
Use a 1-5kΩ potentiometer, connecting to AI1 and +10V-GND terminals (+10V provides up to 10mA power).
Recommended wiring length is less than 20 meters to minimize signal interference.
Setup Steps:
Set P5-11 to 0 (two-wire mode 1) to enable terminal control.
Configure P5-15 and P5-16 to define the potentiometer input range.
Rotate the potentiometer and observe frequency changes on the display to ensure proper speed adjustment.
Common Fault Codes and Resolutions
The KD600M series manual lists various fault codes with corresponding resolution methods. Below are common faults and their troubleshooting steps:
Fault Code
Fault Name
Resolution Method
Err01
Inverter Module Protection
Check U, V, W terminals for shorts or grounding, inspect overheating, wiring, fans, and vents; contact support if unresolved.
Err04
Acceleration Overcurrent
Check output circuit, motor parameters, acceleration time (P9-22), V/F gain, voltage, load, and VFD capacity; adjust parameters.
Err05
Deceleration Overcurrent
Check output circuit, motor parameters, deceleration time (P9-23), voltage, load, brake unit/resistor, and flux gain; adjust parameters.
Err06
Constant Speed Overcurrent
Check output circuit, motor parameters, voltage, load, and VFD capacity; adjust parameters.
Err08
Acceleration Overvoltage
Check voltage, external force, acceleration time, brake unit/resistor, and motor parameters; adjust settings.
Err09
Deceleration Overvoltage
Check voltage, external force, deceleration time, and brake unit/resistor; adjust settings.
Err10
Constant Speed Overvoltage
Check voltage, external force, and resistor installation; adjust parameters.
Err12
Undervoltage Fault
Check power stability, voltage range, bus voltage, rectifier, and drive/control board; reset or contact support.
Err13
Drive Overload
Reduce load, check motor condition, consider upgrading VFD.
Err14
Motor Overload
Adjust P9-01 settings, check load and motor condition, upgrade VFD if needed.
Err15
Drive Overheating
Lower ambient temperature, clean vents, check fans and thermistor, replace module if necessary.
Err17
Current Detection Fault
Check wiring, current devices, and main/control board; contact support.
Err20
Ground Short Circuit
Check motor and cables for shorts, replace if needed; contact support.
Err23
Input Phase Loss
Check power supply, drive/lightning/main board; contact support.
Err24
Output Phase Loss
Check motor wires, output balance, drive/module; resolve fault or contact support.
Err25
EEPROM Operation Failure
Check EEPROM chip, replace main board if necessary; contact support.
Err27
Communication Fault
Check host, communication settings, and P8 group parameters; adjust wiring/parameters.
Err28
External Fault
Check DI terminal input, reset fault.
Err29
Speed Deviation Excessive
Extend acceleration/deceleration time, reset P9-31/P9-32.
Err30/31
User-Defined Fault 1/2
Check DI terminal input, reset fault.
Err32
PID Feedback Loss
Check feedback signal, reset PA-13.
Err33
Quick Current Limit
Reduce load, extend acceleration time, or upgrade VFD.
Err34
Load Drop Fault
Reset or adjust P9-28 to P9-30 conditions.
Err35
Input Power Fault
Adjust voltage, extend power cycle.
Err37
Parameter Storage Anomaly
Check DSP-EEPROM communication, replace main board if needed.
Err39
Run Time Reached
Check run time, reset if necessary.
Err40
Cumulative Run Time Reached
Check cumulative run time, reset.
Err42
Motor Switching During Run
Ensure correct motor switching procedure.
Err46
Master-Slave Communication Interrupt
Check master-slave communication connections.
General Fault Handling Steps
Power Off Check: Disconnect the VFD power before addressing any fault to ensure safety.
Refer to Manual: Consult the manual’s troubleshooting section for specific steps based on the fault code.
Parameter Adjustment: Adjust relevant parameters (e.g., acceleration time P9-22, deceleration time P9-23) according to the fault cause.
Reset: Use the STOP key or set P9-11 (auto-reset attempts, 0-20, default 0) and P9-13 (reset interval, 0.1s-100.0s, default 1.0s) to reset faults.
Technical Support: Contact K-DRIVE technical support if the fault persists.
Conclusion
The K-DRIVE KD600M series VFD offers robust control capabilities through its intuitive operation panel, flexible parameter settings, and powerful external control features. By mastering the operation panel functions, parameter initialization, password protection, external terminal control, and fault resolution methods, users can ensure stable operation across various industrial scenarios. It is recommended to always refer to the user manual for detailed guidance and safety precautions to maximize the device’s performance and longevity.
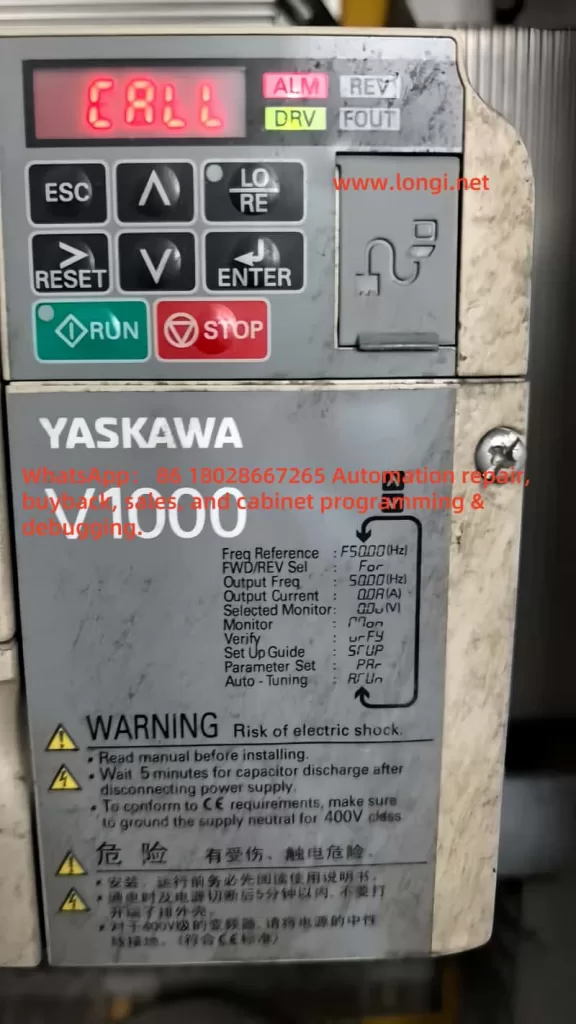
The Yaskawa V1000 series inverter is renowned for its efficient vector control performance and wide range of applications, making it a vital component in industrial automation, including systems like fans, pumps, and conveyor belts. However, during operation, the inverter may encounter various faults, with the “CALL” fault being a common communication-related issue. When the inverter’s display shows “CALL” accompanied by the ALM (alarm) light turning on, it typically indicates a communication link abnormality, which may result in system shutdown. This article provides an in-depth analysis of the nature of the “CALL” fault, its causes, and resolution methods, along with preventive measures to help users quickly restore equipment operation and enhance system reliability.
Nature of the “CALL” Fault
In the Yaskawa V1000 series inverter, “CALL” generally signifies a communication-related issue, potentially indicating that the inverter is awaiting a signal from a master device (e.g., PLC) or has detected an error in the communication link. In some instances, “CALL” may serve as a general prompt, urging users to investigate specific fault codes (e.g., “CE” for MEMOBUS/Modbus communication errors) further. The illumination of the ALM light suggests the inverter has detected an abnormal state, typically interrupting output and allowing the motor to enter a free-stop mode.
Based on relevant documentation, while “CALL” is not explicitly listed in the V1000 series fault code table, it is closely related to communication problems, possibly linked to codes like “CE” (MEMOBUS/Modbus communication error) or “bUS” (option card communication error). In certain communication protocols (e.g., Modbus), “CALL” might indicate a more severe communication issue, potentially necessitating inverter replacement.
Causes of the “CALL” Fault
The occurrence of a “CALL” fault may be attributed to the following causes:
Communication Cable Wiring Issues:
Loose, broken, or short-circuited communication cables can lead to data transmission failure.
Incorrect wiring (e.g., improper terminal connections) may prevent communication between the inverter and the master device.
Communication Parameter Configuration Errors:
Mismatched communication parameters (e.g., HS-01 slave address, HS-02 communication speed, HS-03 parity) with the master device.
For example, if the inverter’s baud rate is set to 9600 bps while the PLC is set to 19200 bps, communication will not establish.
Hardware Problems:
Failure or improper installation of communication option cards (e.g., Modbus, CC-Link, or PROFIBUS-DP cards).
Damaged or poorly contacted communication terminals.
Electromagnetic Interference (EMI):
Common electromagnetic noise in industrial environments (e.g., from motors or transformers) may disrupt communication signals, causing data transmission errors.
Master Station Program Errors:
Incorrect configuration in the master device (e.g., PLC) may prevent proper command transmission or response reception.
For instance, the PLC may not have the correct slave address or communication protocol set.
Communication Timeout:
If the inverter does not receive a response from the master within a specified time (e.g., as set by parameter HS-09), it may trigger a “CALL” fault.
Steps to Resolve the “CALL” Fault
To effectively address a “CALL” fault, follow these troubleshooting and resolution steps:
Step 1: Inspect Physical Connections and Wiring
Check Cables: Inspect communication cables for damage, breaks, or short circuits. Ensure the correct cable type (e.g., RS-485 or RS-422) is used.
Verify Connections: Confirm all terminals are securely connected with no looseness or poor contact.
Refer to Manual: Ensure terminal connections (e.g., R+, R-, S+, S-) are correct as per the Yaskawa V1000 technical manual.
Step 2: Verify Communication Parameters
Use the inverter’s digital operator panel or programming software (e.g., DriveWorksEZ) to check the following parameters:
HS-01 (Slave Address): Set to a unique address between 1-247, matching the master device.
The “CALL” fault is a significant communication-related issue in Yaskawa V1000 series inverters, potentially leading to system downtime and affecting production efficiency. By inspecting wiring, verifying communication parameters, performing self-diagnostic tests, and reducing electromagnetic interference, most “CALL” faults can be resolved. Implementing preventive measures such as regular maintenance, parameter documentation, and the use of shielded cables can greatly reduce the incidence of such faults. For complex or persistent issues, consulting the Yaskawa V1000 technical manual or contacting Yaskawa technical support for professional assistance is recommended. Ensuring the reliability of the communication system is crucial for maintaining stable operation in industrial applications.
Edwards, a global leader in vacuum technology, offers the EPX series vacuum pumps, renowned for their innovative design and exceptional performance. The EPX series is a high-vacuum primary pump that integrates regenerative and Holweck stage mechanisms, enabling efficient pumping from atmospheric pressure to ultimate vacuums as low as 1 x 10^-4 mbar or 1 x 10^-5 mbar, depending on the model. This design eliminates the need for additional turbomolecular pumps in many applications, simplifying system setups.
Widely used in industries such as semiconductor manufacturing, vacuum coating, analytical instrumentation, pharmaceuticals, and optoelectronics, the EPX series excels in high-vacuum, high-cleanliness, and high-reliability applications. This guide provides a comprehensive overview of the EPX series’ performance features, applications, operational procedures, usage details, and troubleshooting methods to assist users in maximizing the pump’s potential.
1. Performance Features
The EPX series vacuum pumps are engineered for superior performance in high-vacuum environments. Below are the key technical specifications:
Parameter
EPX180LE
EPX180NE
EPX500LE
EPX500NE
Peak Pumping Speed (m³/h)
175
175
500
500
Ultimate Vacuum (mbar)
<1 x 10^-4
<1 x 10^-4
<1 x 10^-5
<1 x 10^-5
Max Exhaust Pressure (bar)
0.2
0.2
0
0
Nitrogen Consumption (slm)
0
25
0
25
Cooling Water Consumption (l/h)
120
120
120
120
Supply Voltage (V)
200/208/400
200/208/400
200/208/400
200/208/400
Power at Ultimate (kW)
1.4
1.6
1.4
1.6
Maximum Power (kW)
3.0
3.0
3.0
3.0
Weight (kg)
45
47
46
48
Inlet/Outlet Connection
ISO63/NW25
ISO63/NW25
ISO160/NW25
ISO160/NW25
Noise (dB(A))
<56
<56
<56
<56
Vibration (mm/s, rms)
<1.3
<1.3
<1.3
<1.3
Pumping Speed and Vacuum: The EPX180 delivers a pumping speed of 175 m³/h, while the EPX500 achieves 500 m³/h. All models reach <1 x 10^-4 mbar, with the EPX500 capable of 1 x 10^-5 mbar due to an additional helical rotor stage.
Cooling System: Water cooling ensures a low environmental heat load, ideal for cleanroom settings.
Cleanliness: The oil- and grease-free mechanism prevents contamination, suitable for high-purity processes.
Nitrogen Purge: N variants (EPX180NE and EPX500NE) include a nitrogen purge facility for handling vapors and low-level corrosive gases and particulates.
Compact Design: Weighing approximately 45-48 kg, the EPX is smaller than equivalent turbomolecular pump and primary pump combinations.
Low Noise and Vibration: Noise levels below 56 dB(A) and inlet flange vibration under 1.3 mm/s ensure suitability for quiet environments.
Power Efficiency: Supports 200/208/400 V three-phase power, with power consumption of 1.4-1.6 kW at ultimate vacuum and a maximum of 3.0 kW.
These features position the EPX series as a high-performance solution for demanding vacuum applications.
2. Applications
The EPX series vacuum pumps are designed for a variety of high-demand applications, including:
High-Vacuum Processes: Ideal for applications requiring higher vacuum levels than typical primary pumps, such as semiconductor load locks, vacuum coating, and analytical instruments, where it can replace turbomolecular and primary pump combinations, reducing system complexity and cost.
Frequent Pressure Cycling: Suitable for processes that cycle frequently between atmospheric and low pressures, such as load locks and rapid-cycle coating systems.
High-Cleanliness Requirements: The oil-free design makes it perfect for pharmaceuticals, electronics, and optoelectronics, ensuring contamination-free systems.
Corrosive Gas Handling: The nitrogen purge facility in N variants enables handling of vapors and low-level corrosive gases, suitable for light-duty corrosive processes.
The EPX series’ versatility and efficiency make it a preferred choice in semiconductor, scientific research, and industrial production settings.
3. Operational Procedures
Proper operation of the EPX series vacuum pump is critical to ensuring performance and safety. Below are the detailed steps for operation:
3.1 Preparation and Installation
Installation Location: Install the pump in the vacuum system before connecting to the electrical supply to prevent accidental operation during setup, which could cause injury or equipment damage.
Inlet Protection: Do not remove the inlet screen or operate the pump with the inlet exposed. If hazardous substances are involved, isolate the pump from the atmosphere and process system.
Piping Connections: Connect the pump inlet to the process system using flexible connections to minimize vibration and stress. Use short pipes with an inner diameter no smaller than the pump inlet. Remove the inlet flange protective cap before installation and use an Edwards centering O-ring and claw clamps to seal the connection.
3.2 Connections
Cooling Water: Connect the cooling water supply and return lines via customer-specified water connectors (refer to Figure 2, items 4 and 9). Ensure cooling water meets environmental conditions (humidity and temperature, refer to Table 5).
Power Supply: Connect the electrical supply through a suitable fuse/isolator, ensuring proper grounding via the protective earth stud (Figure 2, item 3) in compliance with local electrical codes.
Control Interface: Connect external control equipment via the Tool Interface Module (TIM) or End User Controller (EUC). The EPX L, N, and NE series use the EUC for local and network control, while the EPX E series supports manual operation via EUC or PDT.
3.3 Starting the Pump
Use the run button on the EUC (Figure 7, item 1) to start the pump. The run LED (green) illuminates when the pump is operating normally.
For EPX N series pumps, supply nitrogen purge gas through a 1/4-inch compression fitting labeled “N2 Inlet” using 1/4-inch OD tubing, ensuring stable flow (refer to Table 10).
3.4 Monitoring and Control
Status Monitoring: Monitor pump status via front panel LEDs (refer to Table 1 and Figure 4):
Power LED (Green): Indicates main power supply is active.
Run LED (Green): Steady when running, flashing in idle mode.
Warning LED (Amber, EPX N only): Indicates low nitrogen flow.
Alarm LED (Red): Indicates shutdown due to a fault.
Control Options: Use the EUC or PDT menus (Normal, Status, Control, Setup) to check status, adjust controls, and configure parameters. The EUC display provides two-line, 16-character pump status information.
3.5 Stopping the Pump
Use the stop button on the EUC (Figure 7, item 10) to stop the pump.
In emergencies, connect to an emergency stop circuit to disconnect power immediately, requiring a separate start or reset action.
Precautions
Ensure proper grounding to prevent electrical hazards.
Verify cooling water supply meets requirements to avoid overheating.
For EPX N series, regularly confirm the nitrogen purge system is functioning correctly.
4. Usage Details
The EPX series vacuum pumps offer detailed operational features covering their operating range, variant functionalities, and protective mechanisms:
Operating Range: The pumps operate from atmospheric pressure to ultimate vacuum without lubricating or sealing fluids in the pumping chamber, ensuring a clean system with no oil back-migration.
Variants and Applications:
EPX L: Designed for clean tasks (e.g., load locks), supports local and network control via EUC.
EPX N: Equipped with a gas module for nitrogen purging, suitable for light-duty applications with diluted process gases.
EPX NE: Light-duty application pump with network and local control.
EPX E: Supports manual operation via EUC or PDT, ideal for network-controlled setups.
Capacity and Configuration: Available in 180 m³/h (EPX180LE/NE) and 500 m³/h (EPX500LE/NE) capacities, with voltage options of 200/208 V or 400 V, and water connector options of 1/4, 3/8, or 9/16-inch BSP or no quick connects.
Cooling System: Integrated water cooling circuit suits cleanroom environments, avoiding the drawbacks of fan cooling.
Performance Optimization: The EPX Twin offers enhanced performance between 1 bar and 0.2 mbar, ideal for load locks and rapid cycling applications.
Protective Mechanisms: Equipped with sensors like thermal cut-off switches to detect overheating and trigger automatic shutdowns. The EPX N series includes a nitrogen purge flow switch (set to 12 slm) to monitor flow.
5. Troubleshooting
Below are common issues with the EPX series vacuum pumps and their solutions:
Issue
Possible Cause
Solution
Pump Shutdown (Alarm LED On)
Overheating, drive fault
Cool the pump for at least 20 minutes, check cooling water supply (Section 2.4), restart.
Low Nitrogen Flow (Warning LED On)
Insufficient nitrogen supply
Verify nitrogen flow to the gas module; if persistent, contact Edwards service center.
Noise on Restart
Rapid reapplication of run signal
Allow the pump to fully stop before reapplying the run signal; noise is harmless.
Connection Issues
Incorrect control equipment connections
Verify interface connections (Section 3.11); if persistent, contact Edwards service center.
Safety and Maintenance
Electrical Safety: Do not operate without proper grounding or correct electrical connections. The pump contains no user-serviceable parts; maintenance must be performed by Edwards professionals, with power disconnected for at least 4 minutes before removing covers.
Pump Seizure: If the pump seizes, wear gloves, eye protection, and a face mask due to potential aluminum sulfate dust and sulfurous odors.
Service Support: Contact Edwards service centers for repairs, spares, or accessories, providing model, serial number, and part details. Returns require a completed HS2 contamination form.
6. Conclusion
The Edwards EPX series vacuum pumps offer outstanding performance, versatility, and reliability for high-vacuum applications. Their oil-free design, high pumping speeds, and nitrogen purge capabilities make them ideal for semiconductor, pharmaceutical, and research industries. By following proper operational procedures, regular monitoring, and timely maintenance.
Long cables (>30m) mandate output reactors (Sec.1.3.8)
Braking resistors must comply with Table 3-25 specifications
This guide synthesizes critical operational knowledge from the 117-page manual. For complete technical specifications, refer to Chapter 9 (Application Examples) and Appendix (MODBUS protocols). Proper implementation of these procedures will optimize drive performance while ensuring operational safety.
Delta MS300 series inverters are widely used in industrial fields due to their high performance and reliability. However, various faults may occur during use. Among them, CP30 fault (internal communication abnormality) is a relatively common fault. This article will systematically analyze the causes, troubleshooting methods, and solutions of CP30 faults based on official materials and actual cases, helping engineers quickly locate problems and restore equipment operation.
I. Definition and Mechanism of CP30 Fault
1.1 Official Definition
According to Delta’s official technical documents, CP30 is a dedicated error code for internal communication of MS300 series inverters, indicating a communication interruption or signal delay between the control board and the drive board. This fault is usually related to abnormal hardware connections, power fluctuations, or component aging.
1.2 Fault Trigger Scenarios
Intermittent Fault: The equipment suddenly reports an error after running for a period of time. It temporarily recovers after restarting, but the fault recurs repeatedly.
After Environmental Changes: Such as restarting after holidays or when there are significant changes in ambient temperature and humidity.
During Load Fluctuations: Load mutations or frequent starts and stops increase communication pressure.
1.3 Fault Mechanism
The core mechanism of the CP30 fault lies in abnormal data interaction between the control board and the drive board, which may be caused by the following reasons:
Hardware Connection Issues:
Loose or oxidized wiring at the control terminal block.
Communication cables longer than 15 meters without signal repeaters.
Power lines and control lines not laid in separate layers, causing electromagnetic interference.
Power Fluctuations:
The 5V/12V output voltage of the switching power supply fluctuates beyond ±5%, leading to unstable power supply for the control board.
Harmonic interference or voltage mutations in the input power.
Component Aging:
RS485 communication chip failure on the main control board.
EEPROM memory damage or degradation of optocoupler devices (such as PC923, PC929).
Software and Parameters:
Incompatible firmware versions or incorrect parameter configurations.
Communication protocol settings not matching the upper computer.
II. Troubleshooting Process for CP30 Fault
2.1 Preliminary Inspection
2.1.1 Appearance and Wiring Inspection
Control Terminal Block:
Check if the wiring is loose or oxidized, focusing on communication terminals (such as RS485 interfaces).
Ensure that the shielding layer of the cable is grounded at one end to avoid grounding loop interference.
Communication Cables:
Measure the cable length. If it exceeds 15 meters, install a signal repeater.
Check if the cable insulation layer is damaged to avoid short circuits or crosstalk.
Layered Wiring:
Ensure that power lines (main circuits) and control lines (signal lines) are laid separately with a spacing of at least 30cm.
2.1.2 Power and Grounding Inspection
Switching Power Supply Test:
Use a multimeter to measure the control board power supply voltage (5V/12V). The fluctuation should be ≤±5%.
If the voltage is abnormal, check if the filter capacitor is aging or replace the switching power supply module.
Grounding Verification:
Confirm that the grounding terminal is reliably connected and the grounding resistance is ≤4Ω.
Avoid sharing ground wires with power lines to prevent ground wire interference.
2.2 In-depth Hardware Detection
2.2.1 Circuit Board Inspection
Connector Status:
Disassemble the inverter and observe if the connectors between the main control board and the drive board are offset, broken, or oxidized.
Clean the connectors and re-plug them to ensure good contact.
Capacitor and Optocoupler Detection:
Measure the capacitance value of the main circuit filter capacitor. If it is below 80% of the rated value, replace it.
Use an oscilloscope to detect the input and output waveforms of optocoupler devices (such as PC923, PC929) to confirm there is no distortion or delay.
2.2.2 Communication Chip Test
RS485 Chip Detection:
Use a multimeter to measure the voltage difference between the A and B lines of the RS485 chip. The normal value should be 2-3V.
If the voltage is abnormal, replace the RS485 communication chip or the control board.
EEPROM Verification:
Test the EEPROM by initializing the inverter parameters (retain motor nameplate data).
If the fault persists after initialization, replace the control board.
2.3 Software and Parameter Inspection
Parameter Initialization:
Restore the inverter to factory settings and re-enter motor parameters (such as power, number of poles, rated current, etc.).
Confirm that parameters 06-17~06-22 (communication-related parameters) are set correctly.
Firmware Version Check:
Contact Delta or check the firmware version through the inverter panel.
If the version is too old, upgrade to the latest version to fix potential communication vulnerabilities.
Communication Protocol Verification:
Confirm that the communication protocol (such as Modbus, CANopen) of the upper computer (such as PLC, touch screen) matches the inverter settings.
Use a serial debugging tool to simulate communication and verify if data interaction is normal.
III. Solutions for CP30 Fault
3.1 Hardware Repair
Wiring Optimization:
Replace oxidized or loose wiring terminals and use tinned copper wires with crimped terminals.
Install signal repeaters or use shielded twisted pairs to improve communication stability.
Component Replacement:
Replace aging capacitors, optocouplers, or RS485 chips.
If the control board is damaged, contact Delta for original replacement boards.
Power Supply Improvement:
Install three-phase reactors or harmonic filters to suppress input power harmonics.
Replace with high-precision switching power supply modules to ensure stable power supply.
3.2 Software Adjustment
Parameter Optimization:
Adjust the communication timeout time (parameters 14-70~14-73) and extend it appropriately to adapt to complex environments.
Disable unnecessary communication functions to reduce data interaction.
Firmware Upgrade:
Download the latest firmware from Delta’s official website and upgrade the control board with a dedicated programmer.
Protocol Adaptation:
Modify the upper computer program to ensure that the communication instruction format is compatible with the inverter.
Use intermediate devices (such as gateways) to convert different communication protocols.
3.3 Preventive Measures
Regular Maintenance:
Check the tightness of wiring terminals quarterly and clean dust on circuit boards.
Test capacitor values and optocoupler performance annually, and replace aging components in advance.
Environmental Optimization:
Ensure that the inverter is installed in a well-ventilated environment to avoid high temperature, high humidity, or dust pollution.
Keep away from high-power equipment or electromagnetic interference sources, and install shielding covers if necessary.
Backup and Monitoring:
Regularly back up inverter parameters for quick recovery in case of faults.
Install communication status monitoring modules for real-time abnormality alerts.
IV. Typical Case Analysis
Case 1: Intermittent CP30 Fault
Phenomenon: An MS300 inverter in a factory frequently reported CP30 after holidays. It temporarily operated normally after restarting but failed again after a few hours. Troubleshooting Process:
Checked the control terminal block and found severe oxidation of the wiring, increasing contact resistance.
Measured the communication cable length as 20 meters without a repeater, causing significant signal attenuation.
Disassembled the inverter and found oxidation on the pins of the RS485 chip on the main control board, with distorted communication waveforms. Solution:
Cleaned and tightened the wiring terminals and replaced oxidized cables.
Installed a signal repeater to shorten the effective communication distance.
Replaced the RS485 chip to restore communication stability. Result: The fault was completely eliminated, and the equipment operated normally for 3 months.
Case 2: CP30 Fault Caused by Parameter Configuration
Phenomenon: A newly installed MS300 inverter frequently reported CP30 during commissioning, but no hardware abnormalities were found. Troubleshooting Process:
Found that the engineer mistakenly set the communication timeout time to an extremely short value, causing data interaction interruption.
The firmware version was too old, with communication protocol compatibility issues. Solution:
Adjusted the communication timeout time to the default value and optimized other communication parameters.
Upgraded the firmware to the latest version to fix protocol vulnerabilities. Result: The fault was immediately eliminated, and the equipment was successfully put into operation.
V. Conclusion
The CP30 fault is a relatively complex internal communication abnormality in Delta MS300 inverters, requiring systematic troubleshooting from multiple dimensions such as hardware connections, power quality, component aging, and software configurations. By standardizing wiring, conducting regular maintenance, optimizing parameters, and replacing components, such faults can be effectively solved. Engineers should combine official materials with actual cases, flexibly use detection tools, and gradually narrow down the fault scope to achieve rapid repair.
1. Introduction: Background and Importance of the Fault
In industrial automation systems, inverters play a vital role in controlling motor speed, improving energy efficiency, and enabling flexible control. The Shengchuan S350 series inverter is widely used in automated production lines due to its high performance and reliability. However, when the inverter displays error code E017, it usually results in a startup failure or shutdown, which can seriously impact production continuity. Understanding the real cause behind the E017 alarm, distinguishing it from misinterpretations, and knowing how to troubleshoot it efficiently are crucial for technicians and maintenance engineers.
_cuva
2. Understanding the E017 Fault Code
2.1 What Does E017 Mean?
In the Shengchuan S350 inverter, E017 is defined as a contactor fault, which occurs when the internal main circuit contactor (often the pre-charging or main contactor) fails to engage or the feedback signal is missing during power-up or start-up phases.
2.2 Misinterpretation in Some Manuals
Some manuals may mistakenly describe E017 as a “keypad fault.” However, in actual on-site scenarios and based on electrical logic and signal paths, this alarm is clearly linked to internal contactor failures, not the keypad (HMI) panel.
3. Causes of E017 Fault – Multi-dimensional Analysis
Type of Cause
Specific Issues
Field Symptoms & Hints
Contactor Component
Coil damage, oxidized or welded contacts
No clicking sound during start-up; blackened contacts
Drive Signal Failure
No output signal from control or drive board
No control voltage present at coil terminals
Feedback Circuit Issue
Feedback contact not closing or faulty
Contactor works, but inverter doesn’t recognize it
Power Supply Instability
Low voltage, failing power board
Insufficient coil voltage to energize contactor
Control Logic Misjudge
Incorrect sequence or parameter settings
Inverter fails to detect correct engagement logic
4. Step-by-Step Troubleshooting Procedure
4.1 Listen for Sound and Check Contactor Action
Upon power-up or start, is there a clicking sound (“clack”) from the contactor?
If no sound is heard, the contactor might not be energized or is physically damaged.
4.2 Measure Coil Voltage
Use a multimeter to check whether the contactor coil receives the control voltage (usually DC 24V or AC 220V).
If no voltage is detected, the issue is likely with the drive board or control signal.
4.3 Check Feedback Contact Integrity
Some inverters monitor auxiliary contacts on the contactor for feedback.
If the auxiliary contact is damaged or misaligned, even a working contactor may trigger E017.
4.4 Swap and Compare Boards
If you have another working S350 inverter, try swapping the contactor or drive board.
If the fault moves with the board, it’s likely a board-level issue. If it stays, the contactor is to blame.
_cuva
5. Repair and Replacement Recommendations
5.1 Replace the Contactor
The most effective solution is to replace the faulty contactor with a manufacturer-approved component matching the same coil voltage and rated current.
Ensure proper tightening of terminals and clean installation surface.
5.2 Drive Board and Power Board Check
If the contactor has no drive signal, check if the relay or transistor circuit on the drive board is faulty.
A failing power supply board may output unstable voltage and should be checked or replaced.
5.3 Wiring and Signal Feedback
Verify all wiring is tight, corrosion-free, and correctly routed.
Clean and reconnect feedback lines if necessary.
5.4 Parameter Initialization and Reset
After component replacement, perform a full reset of the inverter and reconfigure necessary startup parameters.
Check if the inverter correctly recognizes contactor engagement signals.
6. Practical Case Studies
Case 1: Drive Board Failure
A technician encounters E017 on an S350 inverter. No clicking sound is heard on power-up. Measuring the coil terminal reveals 0V. After swapping the drive board with one from a working unit, the contactor clicks and the inverter starts normally. Conclusion: the original drive board failed to output the control signal.
Case 2: Feedback Contact Issue
Another unit shows E017 but the contactor does engage. Closer inspection shows the auxiliary feedback contact did not close properly due to carbon build-up. Cleaning restored function, but to ensure long-term reliability, the contactor was later replaced.
7. Preventive Maintenance Tips
Regularly Clean Contactors Prevent dust, moisture, and carbon buildup from interfering with mechanical motion or electrical contact.
Monitor Power Supply Quality Ensure stable voltage supply to the control board and contactor coil to prevent intermittent faults.
Log Faults and Spare Part Info Keep a history of faults and maintain a stock of critical spares such as contactors, drive boards, and power boards.
Perform Routine Start-Up Tests Periodically run the inverter in test mode to check for early signs of engagement or feedback failure.
8. Summary and Conclusions
The E017 error code in the Shengchuan S350 inverter most accurately refers to an internal contactor failure, not a keypad issue.
Diagnosing the fault involves confirming whether the contactor actuates, checking for control voltage, and verifying feedback signal integrity.
Most common causes include faulty contactors, failed drive boards, or broken feedback circuits.
Effective troubleshooting requires listening for sounds, using a multimeter for voltage checks, and replacing components as needed.
Preventive maintenance and spare part readiness are essential to avoid prolonged downtime in industrial systems.
Variable frequency drives (VFDs) are critical components in industrial automation, enabling precise control of motor speed and torque to enhance efficiency and performance. The V680 series VFD, produced by Shenzhen Tai Da Holdings, is a high-performance model widely used in applications such as manufacturing, HVAC systems, and conveyor operations. However, like all sophisticated electronic devices, it may encounter faults that disrupt operations. One common issue is the “E-09” fault code, which indicates an undervoltage condition. This article provides a comprehensive analysis of the E-09 fault’s mechanisms, implications, diagnostic procedures, solutions, and preventive strategies, drawing from technical insights and industry resources.
Technical Background of the V680 Series VFD
Role of VFDs
VFDs regulate the speed and torque of AC motors by adjusting the frequency and voltage of the power supplied. This capability optimizes energy consumption, reduces mechanical stress, and enhances process control in industrial settings. The V680 series, with its advanced vector control algorithms, is designed for demanding applications requiring high reliability and precision.
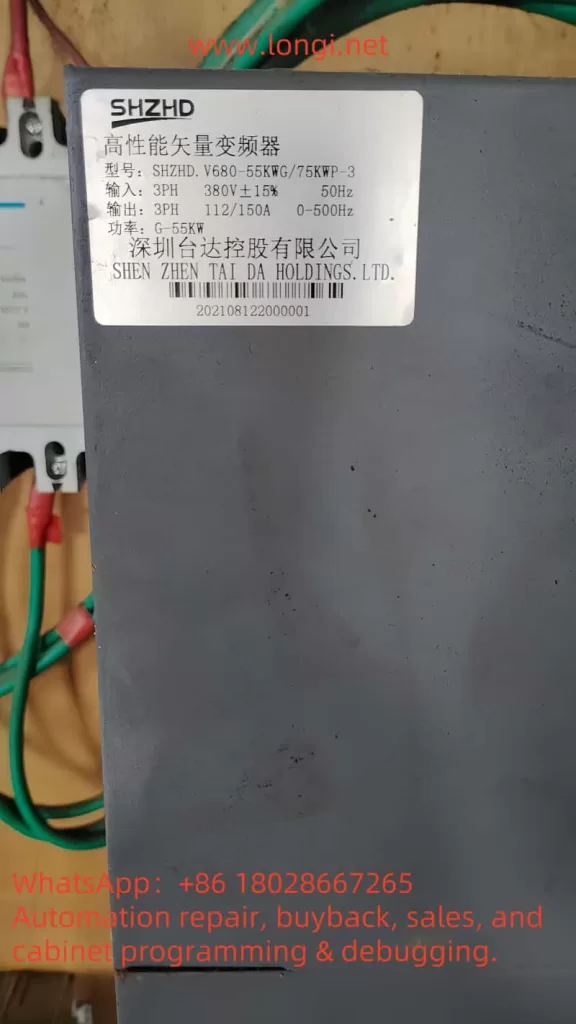
V680 Series Specifications
Based on available information, the V680 series (model: SHZHD.V680-55KW/75KWP-3) has the following key specifications:
Parameter
Specification
Input
3-phase, 380V ±15%, 50Hz
Output
3-phase, 112/150A, 0-500Hz
Power
G-55kW
Manufacturer
Shenzhen Tai Da Holdings Co., Ltd.
The input voltage range of 323V to 437V is critical for understanding the E-09 fault, as voltages below 323V trigger undervoltage protection.
Definition and Implications of the E-09 Undervoltage Fault
Definition
The E-09 fault code signifies that the VFD’s input voltage has fallen below the minimum threshold required for safe operation, typically around 323V for a 380V system. This undervoltage condition prompts the VFD to halt operation to protect itself and the connected motor, displaying “E-09” on the control panel.
Implications
The E-09 fault can have significant consequences:
Operational Downtime: The VFD’s shutdown halts motor operation, disrupting production processes and potentially causing financial losses in industries reliant on continuous operation.
Component Wear: Prolonged undervoltage can stress electrolytic capacitors and other components, reducing their lifespan and increasing maintenance costs.
Performance Issues: In applications requiring precise motor control, such as conveyor systems, undervoltage may lead to erratic motor behavior, compromising product quality.
Mechanisms Behind the E-09 Undervoltage Fault
VFD Operational Principles
A VFD converts input AC power to DC through a rectifier, stores it in a DC bus with capacitors, and then inverts it back to AC with adjustable frequency and voltage to drive the motor. The DC bus voltage, typically around 520V for a 380V input, is crucial for stable operation. A drop in input voltage reduces the DC bus voltage, triggering the E-09 fault if it falls below the undervoltage threshold (approximately 60% of nominal, or ~312V DC).
Causes of Undervoltage
The E-09 fault may result from several factors:
External Power Supply Instability:
Grid Fluctuations: Variations in the utility power supply, such as voltage sags or outages, can lower the input voltage.
Heavy Load Demands: Simultaneous operation of high-power equipment may cause voltage drops.
Phase Loss: Loss of one phase in a three-phase system increases DC bus ripple and may trigger undervoltage protection.
Internal Component Failures:
Capacitor Degradation: Electrolytic capacitors in the DC bus may lose capacity over time, failing to smooth voltage fluctuations.
Rectifier Issues: Damaged diodes or rectifiers in the power conversion circuit can impair voltage regulation.
Pre-Charge Circuit Problems: Faulty pre-charge relays or resistors can prevent proper DC bus charging, especially during startup.
Wiring and Connection Issues:
Loose or corroded connections increase resistance, causing voltage drops at the VFD’s input.
Improper wiring, as outlined in the V680 manual’s connection diagrams, can exacerbate the issue.
Environmental Factors:
High temperatures or humidity can degrade component performance, indirectly contributing to undervoltage.
Dust accumulation may cause overheating or short circuits, affecting voltage stability.
Sensing Circuit Malfunction:
A faulty DC voltage sensing circuit within the VFD may incorrectly detect low voltage, causing nuisance trips.
Trigger Mechanism
The VFD continuously monitors the DC bus voltage. When it detects a voltage below the undervoltage threshold, it activates the E-09 fault, halting operation. For the V680 series, this threshold is likely set to protect against voltages below 323V AC, corresponding to a DC bus voltage of approximately 312V. The fault may reset automatically after 5 seconds if the voltage stabilizes, as noted in some Tai Da VFD documentation.
Diagnostic Steps for the E-09 Fault
Diagnosing the E-09 fault requires a systematic approach to identify the root cause:
Verify Input Voltage:
Measure the input voltage at the VFD’s terminals using a multimeter, ensuring it is within 380V ±15% (323V–437V).
Check all three phases for balance and absence of phase loss.
If the voltage is low, investigate upstream power supply issues with the utility provider.
Inspect Internal Components:
Power down the VFD and inspect for visible signs of damage, such as capacitor leakage, bulging, or burn marks on the rectifier or control board.
Test capacitors and rectifiers with appropriate equipment, if qualified, or consult a technician.
Check the pre-charge circuit for relay or resistor functionality.
Examine Wiring and Connections:
Refer to the V680 manual’s wiring diagrams to verify correct connections.
Tighten all terminal connections and inspect cables for damage or corrosion.
Evaluate Environmental Conditions:
Ensure the VFD operates within the recommended temperature (-10°C to +40°C) and humidity (≤95% RH, non-condensing) ranges.
Clean dust from the VFD and improve ventilation if necessary.
Review Control Panel Diagnostics:
Note any additional indicators on the control panel, such as “Hz” or “RUN” status, to contextualize the fault.
Cross-reference the E-09 code with the manual’s fault table, if available, for specific guidance.
Test DC Bus Voltage:
If equipped, measure the DC bus voltage to confirm it aligns with the expected value (~520V for 380V input). Discrepancies may indicate internal issues or sensing circuit faults.
Solutions to Resolve the E-09 Undervoltage Fault
Immediate Corrective Actions
Reset the Fault:
Power cycle the VFD by turning off the main supply, waiting a few minutes, and restarting. Alternatively, use the control panel’s reset function.
Verify if the fault clears after voltage stabilization.
Address Power Supply Issues:
Install a voltage stabilizer or uninterruptible power supply (UPS) to maintain consistent 380V input.
Use a line reactor or isolation transformer to mitigate voltage sags and surges.
Coordinate with the utility provider to adjust transformer tap settings or resolve grid issues.
Repair Internal Components:
Replace faulty capacitors, rectifiers, or pre-charge circuit components, adhering to the manual’s maintenance guidelines and using manufacturer-approved parts.
Engage a qualified technician for complex repairs to avoid further damage.
Correct Wiring Issues:
Tighten loose connections and replace damaged cables as per the manual’s wiring specifications.
Ensure proper grounding to prevent electrical interference.
Mitigate Environmental Factors:
Relocate the VFD to a cooler, drier location or enhance ventilation with fans or air conditioning.
Install dust filters to protect internal components.
Long-Term Preventive Measures
Regular Maintenance:
Schedule monthly or quarterly inspections to check wiring, components, and cleanliness, as recommended in the V680 manual.
Monitor capacitor health and replace them proactively based on their rated lifespan.
Power Protection Systems:
Deploy surge protectors, phase loss relays, and dynamic voltage restorers to safeguard against power anomalies.
Consider a static var compensator for facilities with frequent voltage sags.
Environmental Optimization:
Maintain a controlled environment with stable temperature and humidity levels.
Enclose the VFD in a protective cabinet if exposed to harsh conditions.
Operator Training:
Train personnel to recognize E-09 and other fault codes, enabling quick initial responses.
Provide access to the V680 manual for reference during troubleshooting.
Manufacturer Support:
Establish a relationship with Shenzhen Tai Da Holdings’ customer service for technical support and access to firmware updates or replacement parts.
Comparison with Other VFD Faults
To contextualize the E-09 fault, consider other common VFD faults:
Fault Code
Description
Common Causes
E-10
Overvoltage
Excessive input voltage, regenerative energy
E-06
Overcurrent
Motor overload, short circuit
E-04
Overheating
Poor ventilation, high ambient temperature
E-07
Ground Fault
Motor or wiring insulation failure
While E-09 is specific to undervoltage, its diagnostic and resolution strategies overlap with these faults, particularly in checking power supply and environmental conditions.
Additional Insights from Industry Resources
Research indicates that undervoltage faults, like E-09, are common in VFDs due to their sensitivity to power quality. , undervoltage protection is typically based on DC bus voltage, which for a 380V system should be around 520V. A drop to 60% of this value (~312V) triggers the fault. The site also highlights phase loss as a frequent cause.
Troubleshooting Flowchart
Below is a simplified flowchart for addressing the E-09 fault:
Start
↓
Check Input Voltage (380V ±15%)
↓
Voltage Normal? → Yes → Inspect Internal Components
↓ No
Adjust Power Supply (Stabilizer/UPS)
↓
Fault Cleared? → Yes → End
↓ No
Inspect Wiring/Connections
↓
Connections Secure? → Yes → Check Environment
↓ No
Tighten/Replace Wiring
↓
Environment Normal? → Yes → Reset Fault
↓ No
Improve Ventilation/Cleanliness
↓
Fault Cleared? → Yes → End
↓ No
Contact Manufacturer Support
Conclusion and Best Practices
The E-09 undervoltage fault in the V680 series VFD is a manageable issue when approached systematically. By identifying whether the cause is external power instability, internal component failure, wiring issues, or environmental factors, users can implement targeted solutions to restore operation. The V680 manual is a critical resource, providing wiring diagrams, safety guidelines, and maintenance protocols to support troubleshooting.
Best practices include:
Stable Power Supply: Use voltage stabilizers and UPS systems to ensure consistent 380V input.
Routine Maintenance: Conduct regular inspections to detect and address component wear early.
Environmental Control: Maintain optimal operating conditions to protect the VFD.
Operator Training: Equip staff with the knowledge to respond to fault codes promptly.
Manufacturer Support: Leverage Shenzhen Tai Da Holdings’ expertise for complex issues.
By adopting these strategies, users can minimize downtime, extend the VFD’s lifespan, and ensure reliable performance in industrial applications. This comprehensive approach not only resolves the E-09 fault but also enhances overall system resilience against future power-related issues.
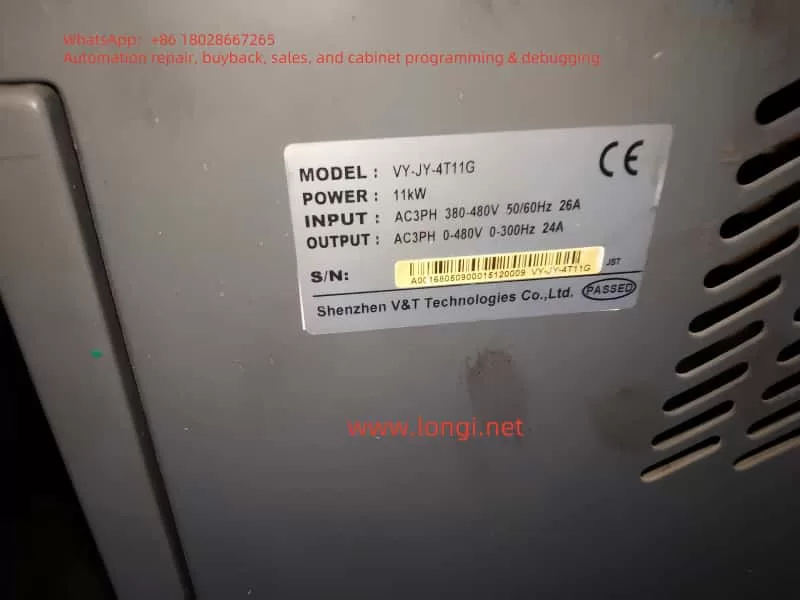
The VY-JY series is a high-performance asynchronous servo drive specifically designed for the hydraulic systems of injection molding machines. It employs sensorless vector control technology to adjust the speed of the oil pump motor to match the flow/pressure requirements of the injection molding process, eliminating overflow energy consumption and achieving a 25%-70% energy savings rate.
2. Technical Highlights
Dual Vector Control Modes:
Vector Control 1: 180% starting torque at 0.50 Hz, speed regulation range of 1:100, and speed stability accuracy of ±0.5%.
Vector Control 2: 180% starting torque at 0.25 Hz, speed regulation range of 1:200, and speed stability accuracy of ±0.2% (comparable to DC motor control).
Core Energy-Saving Technologies for Injection Molding:
Real-time reception of injection molding machine pressure/flow signals to dynamically adjust oil pump speed, eliminating high-pressure overflow losses.
Support for 3 customizable flow-pressure curves (4-point, 5-segment correction) to adapt to different mold processes.
High Reliability Design:
Wide voltage range (DC 360-720V) and triple-protection technology (PCB coating, copper busbar plating, and sealed components).
Short-term overload capacity: 200% rated load for 0.5 seconds, 150% rated load for 1 minute.
II. Installation and Wiring Specifications
1. Installation Environment Requirements
Parameter
Standard Value
Remarks
Ambient Temperature
-10°C to +40°C
Derate rated current by 1% for every 1°C increase above 40°C
Humidity
5% to 95%
Condensation prohibited
Altitude
≤2000 meters
Derate by 1% for every 100 meters above 1000 meters
Vibration
≤15 m/s² (200-500 Hz)
Avoid metal dust/corrosive gases
2. Main Circuit Wiring Essentials
Power Terminals: Connect R/L1, S/L2, and T/L3 to a three-phase power supply (380-480V ±15%).
Motor Terminals: Connect U/T1, V/T2, and W/T3 to the motor. Reverse connection or short-circuiting is strictly prohibited.
Brake Resistor:
Models from 11-15 kW come with a built-in brake unit (terminals B1/B2) as standard.
Models above 18.5 kW require an optional brake resistor with a resistance value greater than the lower limit specified in the manual (e.g., ≥7Ω for a 55 kW model).
Grounding Requirements:
The PE terminal must be independently grounded (resistance <10Ω).
The grounding wire diameter should be selected based on power rating (e.g., 35 mm² for a 90 kW model).
3. Control Circuit Wiring
Analog Inputs:
AI1/AI2: 0-10V or 0-20mA (selectable via jumpers).
AI3: -10V to +10V (supports direction control).
Digital Inputs: X1-X7 support 24VDC switch/pulse signals (up to 50 kHz).
Communication Interface: Dual 485 ports (Modbus-RTU protocol), supporting master-slave control and parameter reading/writing.
⚠️ Safety Warning:
Separate or vertically cross the main and control circuit wiring to prevent interference.
When the motor cable exceeds 100 meters, an output reactor must be installed, and the carrier frequency must be reduced (≤5 kHz).
III. Operation Procedures and Parameter Settings
1. Initial Power-On Operation Procedure
mermaidgraph TD A[Power On] --> B[Restore Factory Parameters P0.01=3] B --> C[Set Motor Nameplate Parameters P9.00-P9.04] C --> D{Can the Load Be Disconnected?} D -->|Yes| E[Rotating Auto-Tuning P9.15=2] D -->|No| F[Stationary Auto-Tuning P9.15=1] E & F --> G[Press RUN Key to Execute Auto-Tuning] G --> H[Set Operating Frequency P0.05] H --> I[Select Control Mode P0.03] I --> J[Start Operation]
2. Injection Molding-Specific Function Configuration
Energy-Saving Mode Activation (H0 Group Parameters):
Function Code
Name
Example Setting
Function Description
H0.00
Plastic Machine Frequency Setting Mode Selection
1
Enable User-Defined 1
H0.03
Plastic Machine Frequency Setting User-Defined 1
0000
Both Flow and Pressure Signals Are Valid
H0.09-H0.16
Flow-Frequency Curve 1
A0=0%, B0=0% A3=100%, B3=100%
4-Point Linear Mapping
Soft PLC Logic Programming (H1 Group Parameters): Perform logical operations (AND/OR/NOT) or mathematical operations (addition, subtraction, multiplication, division) on digital/analog quantities, and output the results to the Y terminal or control frequency. Example: H1.00=111 enables 3-channel logical operations, and H1.01=123 sets X1/X2/X3 as input sources.
3. Key Operating Parameters
Parameter Group
Function Code
Name
Recommended Value
Impact
P0
P0.08
Acceleration Time 0
20.0s
Extend for large inertia loads
P3
P3.05
Stopping Method
2 (Deceleration + DC Braking)
Prevent pump reversal
PA
PA.00
Carrier Frequency
8.0kHz
Reduce for high-frequency noise-sensitive applications
IV. Fault Diagnosis and Maintenance
1. Common Fault Handling
Fault Code
Meaning
Troubleshooting Steps
E.OC1
Acceleration Overcurrent
1. Check for motor cable short-circuits. 2. Extend acceleration time.
E.OU
Deceleration Overvoltage
1. Check brake resistor value. 2. Enable energy dissipation braking.
E.PTC
Motor Overheating
1. Check PTC sensor wiring. 2. Reduce load rate.
2. Regular Maintenance Items
Cycle
Item
Operation
Monthly
Radiator Cleaning
Use compressed air to remove dust (operate with power off).
Semi-Annually
Electrolytic Capacitor Inspection
Check for bulging/leakage; replace if capacity drops by ≥20%.
Annually
Insulation Resistance Test
Motor winding-to-ground insulation resistance ≥5MΩ (500VDC).
🔧 Maintenance Note: Wait 10 minutes after power-off (until the CHARGE light goes out) before operating to ensure bus capacitor discharge is complete.
V. Energy-Saving Benefit Analysis
Energy Savings Rate Calculation Model: Energy Savings Rate=(1−Servo System Energy ConsumptionPower Frequency System Energy Consumption)×100%
Influencing Factors:
Mold Process Speed Value: Energy savings rate ≈70% at 30% speed and ≈25% at 90% speed.
Net Cooling Time: Energy savings rate decreases without cooling time.
✅ Case Study: Post-retrofit measurements for a 220T injection molding machine at a certain factory:
Power Frequency Monthly Energy Consumption: 18,600 kWh
Servo Monthly Energy Consumption: 7,440 kWh
Energy Savings Rate: 60%
VI. Appendix: Key Parameter Quick Reference Table
Category
Function Code
Name
Factory Default
Motor Parameters
P9.02
Rated Speed
1500 rpm
Communication Settings
PC.02
Local Address
1
Protection Functions
PA.21
Auto-Reset Count
0 (Disabled)
Plastic Machine-Specific
H0.34
AI1/AI2 Extended Input Enable
0 (Disabled)
This guide covers the entire process of installation, parameter configuration, fault handling, and energy-saving optimization. It is compiled in conjunction with Chapter 9 (Injection Molding Energy-Saving Principles) and Chapter 10 (Technical Features) of the manual to ensure users quickly master the core applications of the VY-JY series. Before operation, be sure to read the manual’s “Safety Precautions” (Pages 14-16) in detail. Unauthorized operation is strictly prohibited.